
はやぶさ (探査機)
| 小惑星探査機はやぶさ (MUSES-C) | |
|---|---|
| 所属 |
宇宙科学研究所 (ISAS) 現 宇宙航空研究開発機構 (JAXA) |
| 主製造業者 | NEC東芝スペースシステム |
| 公式ページ | 小惑星探査機「はやぶさ」MUSES-C |
| 国際標識番号 | 2003-019A |
| カタログ番号 | 27809 |
| 状態 | 運用終了 |
| 目的 |
イオンエンジン実証試験・ 小惑星探査・ サンプルリターン |
| 観測対象 |
小惑星イトカワ (25143 Itokawa) |
| 計画の期間 |
約4年間(当初) 7年間に延長 |
| 打上げ場所 | 内之浦宇宙空間観測所 |
| 打上げ機 | M-Vロケット5号機 |
| 打上げ日時 |
2003年5月9日 13時29分25秒 |
| ランデブー日 | 2005年9月12日 |
| 軟着陸日 | 2005年11月20日・26日 |
| 運用終了日 | 2010年6月13日 |
| 物理的特長 | |
| 本体寸法 |
6 m × 4.2 m × 3 m (太陽電池パドル・サンプラーホーン展開時) 1 m × 1.6 m × 1.1 m (衛星本体) |
| 質量 | 510 kg(打上げ時、燃料重量含む) |
| 発生電力 |
2.6 kW (太陽より1.0 AUにおいて) |
| 主な推進器 |
イオンエンジンμ10 (8 mN / 3,400秒) × 4 |
| 姿勢制御方式 | 3軸姿勢制御 |
| 主な搭載装置 | |
| AMICA | 可視分光撮像カメラ |
| ONC-T | 望遠光学航法カメラ |
| ONC-W | 広角光学航法カメラ |
| LIDAR | レーザ高度計 |
| NIRS | 近赤外線分光器 |
| XRS | 蛍光X線スペクトロメータ |
| ターゲット マーカ × 3 |
小惑星タッチダウン用人工目標物 うち1個は88万人分の名前入り |
| サンプラー ホーン | サンプルリターンサンプラー |
| 再突入 カプセル | サンプル格納用耐熱容器 |
はやぶさ(第20号科学衛星MUSES-C)は、2003年5月9日13時29分25秒(日本標準時、以下同様)に宇宙科学研究所(ISAS)が打ち上げた小惑星探査機で、ひてん、はるかに続くMUSESシリーズ3番目の工学実験機である。開発・製造はNEC東芝スペースシステムが担当した。
イオンエンジンの実証試験を行いながら2005年夏にアポロ群の小惑星(25143)イトカワへ到達し、その表面を詳しく観測して[注釈 1]サンプル採集を試みた後、2010年6月13日22時51分、60億 kmの旅を終え地球に帰還し、大気圏に再突入した[3][4]。地球重力圏外にある天体固体表面に着陸してのサンプルリターンに、世界で初めて成功した。
概要
[編集]はやぶさは2003年5月に内之浦宇宙空間観測所よりM-Vロケット5号機で打上げられ、太陽周回軌道(他惑星同様に太陽を公転する軌道)へ投入された。その後、搭載する電気推進(イオンエンジン)で加速し、2004年5月にイオンエンジンを併用した地球スイングバイを行って、2005年9月には小惑星「イトカワ」とランデブーした。約5か月の小惑星付近滞在中、カメラやレーダーなどによる科学観測を行った[注釈 2]。次に探査機本体が自律制御により降下・接地して、小惑星表面の試験片を採集することになっていた。その後、地球への帰還軌道に乗り、2007年夏に試料カプセルの大気圏再突入操作を行ってパラシュートで降下させる計画であったが、降下・接地時の問題に起因する不具合から2005年12月に重大なトラブル[注釈 3] が生じたことにより、帰還は2010年へ延期された。 2010年6月13日、サンプル容器が収められていたカプセルは、はやぶさより分離されて、パラシュートによって南オーストラリアのウーメラ砂漠に着陸し、翌14日16時8分に回収された[5]。はやぶさ本体は大気中で燃えて失われた。 カプセルは18日に日本へ到着し、内容物調査が進められ、11月16日にカプセル内より回収された岩石質微粒子の大半がイトカワのものであると判断したと発表された[6][注釈 4][注釈 5]。
小惑星からのサンプルリターン計画は国際的にも例がなかった。この計画は主に工学試験のためのミッションであり、各段階ごとに次のような実験成果が認められるものである。
- イオンエンジンによる推進実験
- イオンエンジン長期連続稼動実験
- イオンエンジンを併用しての地球スイングバイによる加速操作
- 光学情報を用いた自律的な接近飛行制御と誘導
- 小惑星の科学観測
- 微小重力下の小惑星への着陸、および離脱
- 小惑星サンプルの採取
- サンプル収納カプセルの惑星間軌道より直接大気圏再突入・回収
- 地表で小惑星サンプル入手
はやぶさ地球帰還とカプセル大気圏再突入、カプセル一般公開、その後の採取物解析などは日本を中心に社会的な関心を集めた。はやぶさがミッションを終えてからもブームは暫く続いた[8]。
イトカワ探査終了後、JAXAでは「はやぶさ2」をミッションとして立案していたが[9]、2011年5月12日、JAXAは「はやぶさ2」を2014年に打上げる予定であると発表した[10]。
2013年1月30日に、JAXAがこれまでに蓄積した膨大なデータを広く一般公開するための実験の1つとして、はやぶさのAPIが構築された[11][12]。このAPIは多摩美術大学・東京工科大学に公開され、同大学学生がはやぶさのAPIを使用したアプリケーション開発を行う[11][12]。
名前の由来
[編集]ISASでは探査機の名前は、関係者同士の協議によって命名されて来た。MUSES-Cの場合、「はやぶさ」の他にも「ATOM」(Asteroid Take-Out Mission、アトム)という有力候補が存在した[13]。 この名は的川泰宣を中心に組織票が投じられていた案であった[13]。一方「はやぶさ」は上杉邦憲と川口淳一郎によって提案され、小惑星サンプル採取が1秒ほどの着地と離陸間に行われる様子をハヤブサが獲物を狩る様子に見立てた案であった[13]。他にも「はやぶさ」の名には、かつて東京から西鹿児島を走った『特急はやぶさ』や、鹿児島県の地名でもある『隼人』の面もあった[13]。協議の際に的川は「最近の科学衛星は『はるか』とか大人しい感じの名前や、3文字の名前が多いので、濁点も入った勇壮な『はやぶさ』もいいね」と語り、また「ATOM」は語意の原子から原子爆弾が連想されるとして却下され[14]、結局「はやぶさ」が採用された[13]。 小惑星の名前が「イトカワ」であることから「戦闘機と宇宙機の両方分野で著名な糸川英夫氏に縁の深い、戦闘機『隼』に因んで命名された」と言われることもあったが、本探査機打上げ日に初めて「はやぶさ」という正式名称が発表され、それから3か月後にその目標である小惑星1998 SF36が「イトカワ」と命名されたので、誤解であると川口は説明している[13]。
後続はやぶさ2と対比して「初代はやぶさ」[15]「(はやぶさ)初号機」[16][17] といったレトロニムで呼ばれる場合もある。
ミッション背景
[編集]計画承認までの経緯
[編集]_sampling.jpg)
後に「はやぶさ」に至る小惑星サンプルリターン計画検討は、日本で初めて惑星間空間に到達することになった「さきがけ」の打ち上げが成功裏に行われ、「すいせい」打上げを控えた1985年6月、ISAS教授(当時)鶴田浩一郎が主催する「小惑星サンプルリターン小研究会」として始まった[18]。その成果として翌1986年には1990年代を想定し、化学推進を用いてアモール群に分類される小惑星である「アンテロス」を対象とするサンプルリターン構想が纏まる[19]。しかし、要求を満たす能力を有するロケットが存在しないなど、時期尚早であるとしてプロジェクトの提案は成されなかった[20]。
M-Vロケット開発を受けて検討は再開され、1989年秋 - 翌1990年春にかけて行われた宇宙理学委員会において、M-V2号機プロジェクトとして提案された。だが、LUNAR-A計画に敗れ採用されなかった[21]。その後はランデブーとホバリングによる超接近観測を目的とした工学衛星計画に方向性を改めて再検討が進められることとなった。1991年1月時点において、MUSES-C計画は光学観測による自律航行、3軸姿勢制御、ターゲットマーカーを用いた自律運用、X線分析装置・質量分析器搭載などが検討されており、1997年5月に2段式キックモーターを装備したM-Vで打上げられ、1998年6月にアンテロスに到達するという計画であった[22]。その後も検討は進められ、1995年に小惑星サンプルリターン技術実験探査機として宇宙工学委員会で選定、1995年8月に宇宙開発委員会が承認し[23]、正式にプロジェクトが開始された。
小惑星サンプルリターン計画と並行して、彗星サンプルリターン計画検討も行われていた。1987年のハワイにおけるISY会議の席上で、低価格な彗星サンプルリターン計画「SOCCER」の検討をジェット推進研究所(JPL)とISASとの合同で開始することが決定された。M-Vによる打上げや、マリナーMarkII計画の「CRAF」との連携を視野に入れたデルタロケット使用も検討され[24]、1992年のディスカバリー計画ワークショップにおいて提案されるが、採用されなかった。その後、1994年にISASはMUSES-C計画に注力することを決定、SOCCER計画から外れる。その後、JPLによって検討を続けられたこの計画は、「スターダスト」としてディスカバリー計画に採用された[25]。
目的地変更
[編集]
1994年に本格化した計画当初、目的地の小惑星は(4660)ネレウスであった。しかしM-Vロケットで打ち上げ可能な探査機の能力から見て、ネレウスへ向かうことが難しいと判断され、第2候補である (10302) 1989 ML という小惑星に変更された。しかし2000年2月10日のM-Vロケット4号機打上げが失敗、2002年初頭に予定されていた打上げ計画が延期となって、1989 MLへ向かうことが出来なくなった。その結果、(25143)1998 SF36が3つ目の候補として浮上、目的地として決定することとなった。
はやぶさ命名3か月後の2003年8月、目的地の小惑星1998 SF36は、(探査対象となったことから)日本の宇宙開発の父、糸川英夫に因んで、「イトカワ」と命名された[26]。糸川は中島飛行機出身であり、設計に参加した飛行機としては「戦闘機
構造
[編集]
- 仕様
-
- 全高:1.5 m
- 全幅:1.5 m
- 全備質量:510 kg
- 電源:トリプルジャンクション太陽電池、リチウムイオン二次電池、リチウム一次電池(再突入カプセル関連機器のみ)
バス系
[編集]- コンピュータ
- 主要なコンピュータとして、データ処理計算機(DHU)と姿勢軌道制御計算機(AOCP)がある。これらのリアルタイムオペレーティングシステム(RTOS)は、DHUにはμITRON、AOCPにはVxWorksを使用している[30]。他に、イオンスラスタ制御装置(ITCU)などがある[注釈 7][注釈 8][29]。
- 通信系
- 地球との通信を行うアンテナは3種各1基が備わっていた。これらのアンテナはデジタル送受信機と接続され、制御装置と地球の地上局との間を電波通信によって接続するのに用いられた。探査機の姿勢や電力状況によって3種のアンテナは切替えられ、いずれか1つが常に地球との通信を維持するようになっていた[29]。
- 高利得アンテナ
- 最大のアンテナは1.6 mのパラボラ型高利得アンテナ(HGA)であり、イトカワ近辺まで近付いた超遠距離でも、画像伝送を含めた2 - 4 kbpsでのデジタル信号の通信を行えた[注釈 9]。HGAはz+軸方向に向けて機体に固定されており、0.7度ほどの細いビーム波であるため、正確に地球と通信するためには高精度姿勢制御が要求された[注釈 10][29]。
- 中利得アンテナ
- 中利得アンテナ(MGA)は、巡航中で通信量も少なく、むしろ太陽電池で発電した電力をイオンエンジンへ優先して配分する必要がある期間に用いられた。ある程度の正確さで地球方向へ向けられれば、最大256 bpsで通信が行えた[注釈 11][29]。
- 低利得アンテナ
- 低利得アンテナ(LGA)は、HGA頂部に付けられており、機体本体や太陽電池方向、若干の電波干渉方向などを除けば、地球の位置に関わりなく全周方向への通信が行えたが、これは緊急用通信手段であり、8 bpsと極めて低速度通信であった。LGAを用いなければならないほど、逼迫した状況下での緊急通信用の通信手段として「1ビット通信」という通信機能が用意されていた[注釈 12][29]。
- 電源系

1.キセノン・タンク 2.流量制御部 3.マイクロ波電源 4.中和器 5.イオンエンジン「μ10」 6.スクリーン 7.アクセル 8.ディセル


キセノン原子はマイクロ波加熱によってプラズマ化され、正電荷を有するキセノン・イオンと電子に電離する。キセノン・イオンのほとんどは壁面から電子を受取り、再度キセノン原子となって同じサイクルを繰返す。生み出された電子は開口部より外部へ流れ出る。
図ではマイクロ波による加熱の仕組みは省かれている。

キセノン原子はマイクロ波加熱によってプラズマ化され、正電荷を有するキセノン・イオンと電子に電離する。生み出されたキセノン・イオンはグリッドの穴を通って外部に流れ出るが、巧妙に配置された3層グリッドを通過する間に電位勾配によって30 km/秒程まで加速される。電子は正電荷壁面へ引寄せられ、やがて壁を通って直流電源部に戻って来た電子の流れは中和器へと送られる。
図ではマイクロ波による加熱の仕組みは省かれている。

スクリーン、アクセル、ディセル
- 軌道制御系
- 「はやぶさ」には軌道制御を行うための主推進機としてマイクロ波放電式イオンエンジンμ10を中心とするイオン・エンジン・システム (IES) が搭載されていた。μ10はスラスタA - Dとして、計4台搭載され、他にも多数の装置と組み合わされて宇宙探査機の推進システムとして用いられた。また、姿勢制御にも用いられるRCSが軌道制御にも使用された。
- 以下に「はやぶさ」に搭載されたIES仕様を示す。
IESの仕様[31][29] スラスタ有効直径 105 mm × 4 定格推力 8 mN × 4 消費電力 1050 W(350 W x 3) 比推力 3200秒 推力方向制御 2軸ジンバル±5° マイクロ波電源 進行波管(4.25 GHz x 4) 加速用高圧電源 3台 搭載推進剤 キセノン66 kg (但し、最大積載量は73 kg) 推進剤タンク チタン合金製 容量51リットル
- 構成
- IESの構成を示す。「はやぶさ」のIESは「μ10」イオンエンジンと呼ばれるスラスタを4台備え、それを駆動する直流電源を3台備えるので3基のエンジンまで同時に運用可能。
- 「μ10」それ自体はイオンの生成・加速部に過ぎず、燃料供給系や中和器、電源系などと共に用いられることで本来の性能が発揮出来る。以下に全体構成を重量と共に示す。
構成と重量[29] 装置 重量 スラスタ x 4 9.2 kg マイクロ波電源 x 4 9.2 kg 直流電源(3台) 6.3 kg 推進剤タンク 10.8 kg 流量制御部 6.5 kg ジンバル機構 3.0 kg 機械計装 5.0 kg エンジン制御装置 3.5 kg 電気計装 5.7 kg 総計 59.2 kg
本エンジンは燃料としてキセノンを用いており「イオン生成」・「静電加速」・「中和」という3段階を経て、キセノン・イオンが約30 km毎秒ほどの加速を受けて真空の空間のほぼ一定方向へ放射する仕組みになっている。この陽イオンの放出による反動が、1基当たり8ミリ・ニュートンの定格推力を生む[29]。
- イオン生成
- イオン生成には電子サイクロトロン共鳴 (ECR) という現象を利用している。燃料タンクから流量制御部を経由してイオン生成チャンバー内に導入された希薄なキセノンガスは、マイクロ波による加熱でプラズマされ、電子とキセノン・イオンに電離する。チャンバー壁面が正電圧に印加されているため、負の電荷を持つ電子は生成と同時に壁面へ引き寄せられて比較的短時間に消滅する。反対に正の電荷を帯びたキセノン・イオン (Xe+) は、チャンバー壁面から軽く反発を受けゆるやかに蓄積して行く。4.25 GHzのマイクロ波と1500ガウスの永久磁石によって脈動する電子流が作られ、この高速電子がキセノン原子に次々に衝突することでイオン化を起こす[29]。
- 静電加速
- イオン生成チャンバーに溜まった希薄なキセノン・イオンのガスは、真空中に向けて唯一開口しているグリッドの穴から出て行こうとする。炭素繊維強化炭素複合材料製グリッドは「スクリーン」・「アクセル」・「ディセル」という3層より成るが、スクリーン・グリッドには+1500 V程度が印加され、アクセル・グリッドには-300 V程度が加わり、ディセル・グリッドは0 Vの電圧レベルとなっている。スクリーン、アクセル、ディセルという3枚のグリッドは0.5 mm間隔で並び、それぞれ3・1・2 mmほどの異なる大きさの900個近い穴が空けられており、互いの開口位置が正確に合わされている[注釈 16]。正電荷を帯びたキセノン・イオンは、1枚目の+1500 V程度が印加されているスクリーン・グリッドを通過する過程で穴の縁から反発を受けて流出コースが細く絞られる。1枚目のスクリーン・グリッドを通過した直後に、2枚目の-300 V程度が印加されているアクセル・グリッドに向けて(1500 + 300 =)1800 Vの電位勾配の強い加速を受ける。この加速がIES推進力となる。3枚目の0 Vの電位が掛かっているディセル・グリッドは、低速なイオンがアクセル・グリッドに戻ることを阻止する働きをする。ディセル・グリッドはイオン・エンジンに必須というものではないが、μ10では長寿命化を求めて備えられている。チャンバー内には電離しなかったものや電離後に電子を吸収するなどしたキセノン原子が存在しており、中性電荷のこの原子はグリッドなどの制約を受けず自由に飛び出すが、全体量は比較的少なく、搭載燃料の無駄ではあるが許容されている[29]。
- 中和
- イオン生成を行いキセノン・イオンだけを宇宙空間へ放出すると正の電荷だけが失われ、そのままでは負の電荷が宇宙機に蓄積されて正の電荷を帯びたキセノン・イオン投射効率が落ち、やがては正イオンの放出そのものが行えなくなる。この蓄積される負の電荷を電子の放出という形で正負をバランスさせる働きをするのが中和器である。中和器には-30 Vほどの電圧が掛けられる[注釈 17]。中和器内には、燃料タンクから流量制御部を経由して希薄なキセノンガスが導入される。イオン生成チャンバーと同様に、マイクロ波加熱によってキセノンガスはプラズマとなり、キセノン・イオンと電子へ電離される。イオン生成過程と異なるのは、中和器壁面が負電位であるため、電子は壁より反発を受けるがキセノン・イオンは引かれる。キセノン・イオンは壁に接すると電子を受取ってキセノン原子へ戻る。キセノン原子はマイクロ波加熱によって電離し、再度プラズマの一部となるので、キセノンは中和器内にある限り同じサイクルを繰返す。電子は壁より供給され続ける限りキセノンを仲立ちにいくらでも生成されるため、中和器内に充満した電子は唯一の開口部から真空空間へ向けて流れ出す。中和器より出た電子は3層のグリッドを通過してきたキセノン・イオンと結び付いてキセノン原子となる。イオン生成チャンバーと同様に、中和器内のキセノンガスやキセノン・イオンも真空中に漏れ出すが、その量は比較的少ないために、搭載燃料の無駄ではあるが許容されている。また、中和器で消費されるキセノンガスは、イオン生成チャンバーに比べると少量で済む[29]。


3台の直流電源から4台のスラスタへ配電する。
- 流量制御部
- 流量制御部は、1基だけの推進剤タンクから圧力を減じながら4基のスラスタへ必要に応じて適正な圧力でキセノンを供給するために設けられている。推進剤タンク圧力は、当初は70気圧ほどもあり、運用によって消費されたが地球帰還時でも30気圧ほどあった圧力をスラスタが必要とする0.6気圧程度へ下げる働きを果たす。このようにキセノンガス流量と圧力を調整するために、高圧・低圧系のそれぞれにラッチング・バルブと非通電時は常に閉じているバルブの2種類を2組と4組に並列にした冗長構成バルブ群にされており、高圧 / 低圧の中間にアキュムレータ(ACM)と呼ぶ貯圧タンクを設けることで圧力調節を行っている。低圧側バルブを閉じた状態で高圧側バルブを開くと、推進剤タンクよりアキュムレータにキセノンガスが流入する。高圧側バルブを開けておく時間でアキュムレータ内に蓄えられるガス圧を調節する。適正な圧力になれば高圧側のバルブを閉じてから、4系統あるスラスタ側配管の適切な低圧側のバルブを開く。スラスタ側配管では各組ごとのイオン生成チャンバーと中和器が連接されており、片側だけを閉じたり開いたりは出来ない[注釈 18][注釈 19][注釈 20][注釈 21][29]。
- 直流電源
- 直流電源(IPPU 1 - 3)は、太陽電池パネルやバッテリーからの電流供給を受けて、キセノン・イオンの加速や中和器の電子放出の原動力となる。このような直流電源は、これまでの宇宙機でも長年培われた通信機用高圧電源技術であるため信頼性が高く、予備などを含めて4基になったスラスタに対しても電源は3台で十分だと判断され、実際にもトラブルは生じていない[注釈 22][29]。
- 姿勢制御系

12基の姿勢制御スラスタの配置。
太陽電池パドルへの影響を避けて、±y面には付けられていなかった。
- 姿勢制御スラスタ
- 20 Nの推力を有する2液式軌道制御用も兼ねた姿勢制御スラスタ (RCS) が±z面の上下4つのそれぞれの角に計8基と±x面の左右に2基ずつの計4基で合計12基あり、軌道制御や姿勢制御に用いられた。RCSにはA系とB系の2系統配管がある。[注釈 24] 加圧に不活性なガスを用いている推進剤のタンクは、無重力環境では単にタンクにパイプを繋いだだけでは、その時々の液体位置によって配管内に流れるものが液体であったりガスであったりして問題がある。燃料であるヒドラジンタンクと酸化剤四酸化二窒素タンクのうち、燃料タンクはゴムなどの袋に充填され周囲から加圧ガスで押すようになっている。酸化剤は腐食性が強いので高分子化合物は用いられず、はやぶさでは金属製ベローズをタンクに収めることで腐食されずに加圧ガスで押すようになっていた。ノズル基部の噴射器から当初は最短で30ミリ秒の、運用中に改良して最短10ミリ秒のパルス状の噴射、もしくはそれ以上の必要な長さの噴射を行なえた。噴射された2つの推進剤は直ちに化学反応を起こして燃焼し、そのガスがノズルを広がりながら一方へ飛び出す反動が推力となるものであり、スケール違いや加圧ポンプなどがない他は、大型2液による液体燃料式ロケットと同じ仕組みであった[注釈 25][29]。
- リアクションホイール
- ゼロモーメンタム方式による3軸姿勢制御を行う本機では、姿勢制御装置として3軸3基のリアクションホイール(RW)を搭載していた。電力を使用することで角運動量を調節できるリアクションホイールは、RCSのように推進剤を消費しないので長期間の宇宙活動には適するが、機体モーメントをホイール内に蓄積し続けると月単位では回転数が上限値を迎え「飽和」してしまうため、RCSのような何らかの方法で時折、機体外に無用な回転運動量を放つ「アンローディング」作業が必要になる[注釈 26][注釈 27][29]。なお、ホイール部分に固体ロケットの衝撃から守るため、アルミがまかれており、これと本体を接着する接着剤が熱により剥がれ回転部に巻き込んだことによって、機能を停止した。
探査機器
[編集]宇宙機でのミッション系に相当する探査機器類は、受動的なセンサ系と能動的なサンプル採取関係のものに大きく分けられる。センサ系は小惑星への接近時に用いられる純然たるミッション誘導用と、ミッション内容によらず宇宙空間内での位置や方向などを知るための航法用のものがあり、双方を兼ねるものもある[注釈 28][注釈 29][29]。
- センサ系
- 外部状況を知るためのセンサには、スタートラッカ(STT)やジャイロ、それに光学航法カメラ(ONC)系統などの航法用センサ類と、探査ミッションに関わる対象物の科学的データを得るためのセンサ類が搭載された。また、機体内部温度や電圧、電流といったセンサもそれぞれの搭載機器に多数が配置され制御系へ測定データを提供していた[29]。
- 航法用センサ
-
- センサ
- 太陽位置を検出することで自機方向を知る、航法用センサとしては最も基本的なものである[29]。
- スタートラッカ
- スタートラッカ(STT)は、比較的明るい星の位置を検出することで自機方向を知る航法用センサである。地球を周回するような近距離では、センサだけ搭載しておいて星図データとの照合は地上にデータ送信することで対応する方法が主体であるが、はやぶさでは星図データを搭載して自ら照合する自立星同定機能を備えていた。本機の実体は30×40度程度の視野角を有するカメラであった[29]。
- 光ファイバ・ジャイロ
- 慣性基準装置(IRU)とも呼ばれる光ファイバ・ジャイロは3軸ごとに機体の回転運動を測定する。IRUは実績がある米国製700 gほどの製品が採用され2台(各3軸計測)が搭載された[注釈 30][29]。
- 加速度センサ(ACM)
- 加速度センサは機体の直線加速度を測定する。3軸方向が必要となる。理論上は直線加速度を積算することで宇宙空間内での移動距離が判るはずであるが、微小な加速度の測定は誤差が大きく、ACMだけでは正確な航法・誘導は行えない[29]。
- 光学航法カメラ(ONC)
- 3台ある光学航法カメラ(Optical Navigation Camera)は航法用センサであると同時に、科学観測に用いられる探査ミッション用センサでもある。3台のCCDは同種のものが採用され、画像処理回路も1つだけが共通に備え、撮影対象に応じて、底面方向(-z軸)のONC-T(望遠)/ONC-W1(広角)と側面方向 (y軸) のONC-W2(ワイド)[注釈 31] という3つのカメラが切替えて用いられた。
ONC仕様[29] 機器 レンズ 視野角 フィルター 撮像素子 露光時間 重量 望遠光学航法カメラ’ONC-T)[注釈 32] D=15 mm, f=120 mm F8 5.7°x 5.7° 8バンド分光フィルター 背面照射型CCD
1,024x1,024画素
(有効画素1,000x1,024)5.46 ms - 179 s 1.61 kg 広角光学航法カメラ (ONC-W1) D=1.1 mm, f=10.4 mm F9.6 60°x 60° なし 0.47 kg 広角光学航法カメラ (ONC-W2) 0.91 kg アナログ処理回路 (ONC-AE) カメラヘッド駆動・12ビットAD変換 1.01 kg デジタル画像処理回路 (ONC-E) 32ビットRISC CPU+画像処理用ASIC 5.66 kg
- 探査ミッション用センサ
-
- レーザー高度計(LIDAR)
- レーザー測距機とも呼ばれるレーザー高度(LIght Detection And Ranging; LIDA)は、YAGレーザー光を用いた測距装置である。地表反射率を測定する科学機器としての運用も想定されていたため、計測距離は50 m - 50 kmと広範囲[32]。また、着陸降下時の距離測定値を利用し、イトカワの重量と密度推定が行われた[32]。
- レーザーレンジファインダー(LRF)
- レーザーレンジファインダー(Laser Range Finder)は、レーザー光を用いた測距装置であり、LRF-S1・LRF-S2の2台がある[29]。
- LRF-S1:LIDARが比較的長距離を担当するのに対してLRF-S1は近距離を担当し、30度ほどの角度を持たせた4本のレーザー光を用いて対象面の傾きを測定する。70 m以下でLIDARと併用し、互いの誤差を確認しながらLRF-S1測定へ切替える。LIDARがレーザー単パルス波を用いて反射されて来るまでの伝播時間を計測するのに対して、LRFではFM変調した連続レーザー波を送信して反射波との位相差を計測する[29]。
- LRF-S2:サンプラーホーンの長さを測る。着地時などにホーンが押されて縮むが、機体側からホーン先端部との距離を計測することで小惑星との接触を検知するようにした。S1/S1共通のデータ処理回路部 (0.91 kg)が別にあり、切替えて使用するためにS1とS2は同時に使用出来ない[29]。
LIDAR、LRF仕様[29] 機器 測定目標 計測レンジ 誤差 計測周期 重量 LIDAR 機体高度 40 m - 60 km ±1 m(50 m時)
±10 m(50 km時)1回 / 秒 3.67 kg LRF-S1 7 – 100 m ±10 cm(10 m時)
±3 m(100 m時)5回 / 秒 1.45 kg LRF-S2 サンプラーホーンの長さ 0.5 - 1.5 m ±1 cm 20回 / 秒 0.41 kg
- ファンビームセンサ(FBS)
- ファンビームセンサ(Fan Beam Sensor)は、レーザー光を用いた障害物検出器であり、送信機 / 受信機セットが探査機両側面に各2か所、合計4セットが配置されていた。イトカワへの着地(タッチダウン)では、探査機本体が未知の地形へ降下するため、起伏が予想以上に大きい場合に備えて、太陽電池パネル下方空間をレーザービームで扇状にスキャンすることで10 cm大程度の岩石突出部がパネルに接触する前に再上昇して接触回避出来るように考えられていた[注釈 33][注釈 34][29]。
- 近赤外分光器(NIRS)
- 0.8 - 2.1 μmの近赤外線領域を測定する分光器である。InGaAs素子による64画素が1列に並んだ光学的な検出器である。視野角0.1×0.1度で取込んだ検出光を、透過型回折格子によって波長ごとに分散させ、0.8 - 2.1 μmの領域を64バンドで光量を検出する。イトカワを構成する岩石などの組成を知るために、太陽からの反射光を小惑星の表面で測定し、主にケイ酸塩鉱物による吸収スペクトル線を知ることで、組成に関する情報を得るものである。AMICAの可視光領域情報と合わせれば、より詳細な鉱物組成が推定出来る[注釈 35]。NIRSとXRSはコントローラと電源を共有している[29]。
- 蛍光X線スペクトロメータ(XRS)
- X線蛍光分光器とも呼ばれるXRS(X-Ray Spectrometer)は、3.5×3.5度の視野角を有し、1.0 - 10 keVのエネルギー帯域のX線を160 eVの分解能で検知することが可能。本来の小惑星の組成を検知する底面に取付けられたセンサー部にはX線CCD素子が4枚用いられており、太陽活動によってX線放射量が変化するのを補正するための側面に飛び出した位置にある標準試料を捉えている別に1枚が使用され、合計5枚のX線CCD素子が搭載されている。センサー部だけで1.7 kgの重量であり、センサー部とは別にXRS用電子回路が共通電子回路部内に収納されている[29]。オンボードコンピュータ(OBC)としてSTRAIGHTプログラムで開発されたSH-OBCを採用し、当時惑星探査用としては高速であったSH-3(SH7708)の三重冗長系によって観測画像の機上解析を実現した[33][34]。
- 可視分光撮像カメラ(AMICA)
- AMICA(Astroid Multiband Imaging Camera)は、航法用カメラ"ONC-T"の別名であり、航法では元々不要な機能である分光用の8域の分光フィルターホイールが探査用として備わっている。1つのバンドは航法に用いる場合の350 - 950 nmまでの全域を通過させるものであり、残る7つのフィルターが、360430・545・705・860・955・1025 nmを通すようになっている[注釈 36]。偏光フィルターもCCDの4隅に備えられていて、小惑星に接近した時に表面の粒子サイズを検出することろなっていた[注釈 37][29]。
- ターゲットマーカー
- はやぶさはイトカワ上に短時間のみ接地して岩石等の試料を採集するが、その着陸を安全に行うために、広角カメラ"ONC-W1"の撮影によって横軸方向の移動速度を安全値である毎秒8 cm以内に収めるよう降下軌道を制御するが、その際の良好な画像を得るのにターゲットマーカーが用いられる。イトカワに30m程まで接近したはやぶさは、底面にぶら下げた状態のターゲットマーカーの固定ワイヤーを火工品、つまり火薬で焼き切る。はやぶさはRCSで自らは減速することで、ターゲットマーカーを先に着陸地点となるイトカワ上に落としておき、ゆっくり接近しながら、"ONC-W1"はフラッシュで照らした画像と照らさない暗い画像を簡単な内部演算することで、ターゲットマーカーの位置を知る。複数回この処理を行うと、横方向の移動速度を知ることが出来る。
- ターゲットマーカーは重力の小さなイトカワ上で弾まずに確実に定着するように、薄いアルミ製袋にポリイミド粒を収めたお手玉のような構造に作られており、転がり防止用の4つのとげが付けられていた[注釈 38][35]。フラッシュに対して明るい反射を得るため、表面は再帰性反射シート(民生品)で覆われていた[29]。
- サンプラー系
- イトカワ表面よりサンプルを採取するサンプラーは、5つのサブシステムより構成されている。
- プロジェクタ
- サンプラーホーン
- サンプルキャッチャー / カプセル蓋
- 搬送機構
- サンプルコンテナ[29]
- プロジェクタ
- プロジェクタは弾丸(プロジェクタイル)を下方へ向けて打ち出し、イトカワ表面の岩石などを飛散させてサンプルとしてホーン内へ飛び上がらせる役割を持つ。3本の棒状の発射装置がサンプラーホーン基部外面に備わり、電気発火によって推進薬に点火されることで、5 gのタンタル製の弾丸が各1発ずつ順番に発射されると秒速300 mで飛び出してイトカワ表面を打つ。ホーン基部にはアルミ箔の膜が付いた穴が3か所開いており、それぞれのプロジェクタがこれらに合わせて取り付けられている。点火後、弾丸は推進薬の圧力によってアルミニウム製のサボと共に前進し、弾丸はプロジェクタから飛び出すが、サボはプロジェクタ内に留まり変形して銃口を塞ぐので、発射ガスがホーン内に吹込まれてサンプルや地面を汚染することはほとんどない。弾丸は穴からホーン内に入射されると、下部ホーン下端中央付近に飛ぶように照準されている。弾丸はタンタル製であるため、小惑星の岩石組成とは区別が付きやすいとされる。プロジェクタの発射命令は、ホーン長さを測るLRF-S2が1 cmの短縮を検出することで出されることとなっていた[29]。
- サンプラーホーン
- サンプラーホーンは、先端部の内径が20 cmで全長1 mほどのほぼ円筒形をした中空管である。上部ホーンと下部ホーンはアルミニウム製の円錐形であり、ホーン全体の外形を保ちながら、舞い上がったサンプルを最上部へと誘導する働きをする。中部ホーンは耐弾性がある布を円環で支えた蛇腹構造になっていて、打上げ時には畳まれ、宇宙空間で伸ばされるようになっている。舞い上がったサンプルがホーンを破って機体に損傷を与えないように強靭な布が選ばれており、機体自身が地面に接触しないように距離を稼ぐと同時に接地時衝撃吸収も担っている。下部ホーン周囲にはダストガートというスカートがあり、ホーンに入らなかったサンプルが機体側へ飛び上がって障害を発生させないように考慮されている[29]。
- サンプルキャッチャー / カプセル蓋
- サンプルキャッチャーは直径48 mm、高さ57 mmの円筒形容器であり、内部はA室とB室に隔てられている。上部ホーンより導かれたサンプルは45度に傾いた反射板に当たることで進路が横向きに修正されて、1回目のサンプル収集ではB室に格納され、次にA室へ格納される。2室切替は120度(1 / 3回転)ごとに2方向の開口部を有する回転ドア式回転筒キャップによって行われ、最後の1 / 3回転によってこれがそのまま蓋となる。サンプルキャッチャーの一方にはカプセル蓋が固定されている[29]。
- 搬送機構
- サンプルキャッチャーをサンプルコンテナ内に移動させるのが搬送機構の役割である。サンプルの収集を終えて、サンプルキャッチャーをサンプルコンテナ内に移動するには、まず、サンプルキャッチャーに挿入されているホーン上端部を下げる。次に、形状記憶合金製バネへ通電してサンプルキャッチャーとカプセル蓋を押し、これらをサンプルコンテナ内へ挿入する。ラッチ・シール機構に対して信号を送り、ラッチによってカプセルにカプセル蓋を固定する動作と、Oリングによる真空シールを保つ動作を同時に行う。カプセル側と結んでいた信号ケーブルを火工品によるワイヤーカッターで切断した[29]。
- サンプルコンテナ
- サンプルコンテナは帰還カプセル内の中央に位置しており、サンプルキャッチャーを格納する容器である。宇宙空間でサンプルキャッチャーを収容したサンプルコンテナは、サンプルキャッチャー側の2重Oリングと共にサンプルキャッチャーとサンプルコンテナとの狭い間隙を真空に保つことで地球帰還時の再突入の高温より熱伝導を断ち、同時にサンプルコンテナ内まで真空に保つことで地球大気からのサンプル汚染も防ぐようになっている[29]。
- 帰還カプセル
- 帰還カプセルは、直径40 cm、質量16.3 kgの蓋付中華鍋のような形状をした耐熱容器で、サンプルコンテナなどを除けば、ヒートシールド、パラシュート、インスツルメント・モジュールといった要素より構成される。帰還カプセルはサンプルコンテナを収容後、分離地点に到達した所で止められていたラッチを火工品により解除し、18本のヘリカルスプリングが再突入カプセルを回転を付けながら押し出す仕組みである。地球帰還時には最大約43,000 km/時(約12 km/秒)の速度で大気へ突入するため、主に断熱圧縮による空力加熱を受けて前面の空気温度は最大2万 ℃ほどになる。15 MW/m2ほどの加熱率と見込まれる[29][7]。地球帰還後は月軌道付近[7]で本体から分離し(実際には 70,000 km[36] または 74,000 km[37] で分離した)、突入角12度[38]、秒速12.2 km[38] の超軌道速度[7]で再突入する。
- ヒートシールド
- ヒートシールドは、主に炭素繊維強化プラスチック(CFRP)によって作られた耐熱性カバーであり、前面ヒートシールドと背面ヒートシールドの2つの円盤状部品より構成される。最大2万 ℃となる熱に耐えながら、内部への熱侵入を断つことが求められた。前面ヒートシールドは、落下中の減速効果と姿勢安定性を両立させるために曲率半径20 cmの部分球面状外形が選ばれた。高熱に耐えるための外面を形成するCFRP層は「アブレータ」と呼ばれる[注釈 39]。前面側では25 - 36 mmほどのアブレータ層内側には10 mmほどの断熱層が形成され、背面側では11 mmのCFRP層となっている。表面にはアルミ蒸着カプトンの薄膜が貼られている[注釈 40][39]。背面ヒートシールドにはパラシュート一端が繋がり、ヒートシールドを分離・破棄する過程でパラシュートが引出されることとなる[注釈 41][29]。
- パラシュート
- 再突入カプセルは、大気を落下中の高度5 - 10 km付近でヒートシールドを捨て、ポリエステル製のパラシュートを開いて、落下速度を7 m/秒程度にまで減速させる[29]。
- インスツルメント・モジュール
- インスツルメント・モジュールはサンプルコンテナを取囲むように配置されている電子機器であり、リチウム1次電池によってパラシュート開傘命令と電波ビーコン送信が行われる。加速度センサやタイマーによってパラシュート開傘タイミングを決め、開傘後に地上に落下してからはUHF帯でビーコンを送信する[7]。高熱や開傘時の50 Gほどの衝撃にも耐える必要から、基板間は樹脂で満たされ固められている[29]。
-
 探査機「はやぶさ」の模型(相模原市立博物館 2010年7月)
探査機「はやぶさ」の模型(相模原市立博物館 2010年7月) -
 同左(相模原市立博物館 2010年7月)
同左(相模原市立博物館 2010年7月) -
 同左(相模原市立博物館 2010年7月)
同左(相模原市立博物館 2010年7月)



搭載探査機
[編集]MINERVA
[編集]MINERVA(ミネルバ)は、当初、はやぶさへの搭載が予定されていたアメリカ航空宇宙局(NASA)ローバーがキャンセルされたため、それまでゆっくりと開発されていたものが、急遽準備された日本の小型ローバーである。プロジェクトマネージャーの川口淳一郎が日本独自の子探査機を搭載することを提案し開発された。名称は "MIcro/Nano Experimental Robot Vehicle for Asteroid" の略である。カウンターバランス代わりに搭載することが前提となっており、分離機構を含めた質量を1 kg以内に収めることが条件となっていた。NASAのJPLによってMUSES-CN開発が進められていたことから正式なプロジェクトとしては扱われておらず、開発費は技術研究費用から捻出された。民生品や宇宙仕様品の廃棄部位の使用、宇宙仕様品メーカーによる無償提供などで開発コストが大幅に削減されている。当初は正4面体頂点にハエタタキのような構造を取付け、それをモーターで駆動するという方式が考えられたが、駆動部位露出や消費電力面で問題があり、最終的には完全密閉正16角柱形の外形に、内部モーターを駆動してその反力でホップするという方式に決定した。
| 寸法 | 直径 120 mm × 高さ 100 mm(正16角柱) |
|---|---|
| 質量 | 591 g |
| CPU | SH-3(SH7708)(約10 MIPS) |
| メモリ | ROM:512 KB |
| RAM:2 MB | |
| フラッシュメモリ:2 MB | |
| OS | μITRON |
| アクチュエータ | Maxon Motor AG製 DCブラシ・モーター × 2(ホップ用・旋回用) |
| ホップ能力 | 最大9cm/s(速度可変) |
| 電力供給 | 太陽電池:EMCORE製 最大2.2 W(距離:1 AU) |
| 電気二重層コンデンサ:エルナー(株)製、容量:25 F、電圧:4.6 V | |
| 通信 | 9.6 kbps(通信可能距離:20 km) |
| 搭載センサ | CCDカメラ SONY PCGA-VC1 × 3(ステレオ + 単眼) |
| フォトダイオード × 6 | |
| 温度センサ × 6 |
打上げ後2年を経て2005年11月12日に探査機より分離されたが、分離時に探査機が上昇中であったため、イトカワに着陸することは出来ず、史上最小(当時)の人工惑星となった(後にIKAROSのDCAM2により更新[41])。分離後の状態は良好であり、探査機太陽電池パネルを撮影した他、通信可能限界距離を越え通信が途絶するまで18時間に渡ってデータを送信し続けた。
MUSES-CN
[編集]"MUSES-CN"は質量1 kgを目標として開発される予定小型ローバーであった。この着陸探査機は、NASAジェット推進研究所のディープスペースネットワークを利用する対価として「はやぶさ」へ搭載される予定であったが、重量過多と開発費高騰によって2000年11月3日に開発計画は中止された[42]。カメラや近赤外分光器搭載を予定していた[43]。
| 寸法 | 縦 140 mm × 横 140 mm × 高さ 60 mm |
|---|---|
| 質量 | 1.3 kg |
| 電力供給 | 太陽電池:2.9 W |
| 通信機器 | Orbiter-Mounted Rover Equipment(OMRE) |
| 搭載センサ | 0.9 - 7.0 mm帯域赤外線分光計 |
航法
[編集]はやぶさでは、光学複合航法と地形航法が採用されていた。光学複合航法は主に宇宙空間での軌道を決定するためのものであり、地形航法はイトカワへ正確に着地するためのものであった。
- 光学複合航法
- 光学複合航法は電波航法と光学航法を併用する方式である。
- 電波航法
- 距離を最も正確に計測出来るのは電波航法であった。地球からはやぶさへ向けて発射された電波パルスをはやぶさが受取ると、それを直ぐに地球へ向けて送り返す。宇宙空間の電波の伝播速度などが判っているので、地球とはやぶさ間距離が数メートル単位の誤差で計測出来る。また、電波のドップラー効果を計ることによって、地球方向に関する加速 / 減速も正確に計測出来る。はやぶさは太陽引力によって常に引かれているため、自ら推力を出さずに慣性運動を暫く続ければ、地球方向での距離や速度変化から、かなり正確な航跡が算出可能。この計測のためには最低でも3日間は、精度を高めるためにはさらに数日間は、軌道制御に関わるイオンエンジンなどは使用出来ない。長距離になると誤差が大きくなり、3億 km先では数百 kmの誤差となる。
- 光学航法
- 光学航法は光学航法カメラから得た画像により主にイトカワの方向や位置を知るのに用いられ、また、自機方位や位置算出にも利用可能。
- 光学複合航法では、上記の各種データを収集して地球で幾何学的分析をすることで、はやぶさの位置や方向、イトカワの位置や方向、そしてそれぞれの運動ベクトルと速度が求められる。
- 地形航法
- イトカワの形状を予め特徴点として記憶させておき、地球側からはX・Y・Zの3軸座標を指定することで、はやぶさ自身がイトカワの位置を画像認識することが可能となった[注釈 42]。
はやぶさ軌跡
[編集]打上げからイトカワへ
[編集](時刻は全てJST)
- 2003年
- 5月9日13時29分25秒:内之浦宇宙空間観測所よりM-Vロケット5号機で打上げ。「はやぶさ」と命名[45]。M-V5号機は先端フェアリングが除去され、「はやぶさ」専用に設計・製造されたキックモーターKM-V2によって軌道へ投入された[注釈 43]。予定宇宙空間へ到達してM-Vロケットのはやぶさが放出されると、最初は自動で太陽電池パドルが展開され、次にサンプラーホーンが伸ばされた。はやぶさより電波によってビーコンが届き、軌道が確認されると同時に、地球からの指令を受けて順番に搭載機器の動作確認の手順が開始された。
- 5月27日:イオンエンジン「μ10」(IES)動作試験開始。高電圧を使用する動作試験は、放電事故を避けるために高真空が確保された打上げ後約3週間過ぎてから行われた[注釈 44][注釈 45]。
- 6月 - 7月:IES動作試験が継続された[注釈 46]。週に1回程度は推進を止めて、地球との間で距離や速度の測定を行い、軌道決定した。7月末頃には各スラスタの運転条件がほぼ明らかとなり、A以外の残り3基を順番に用いた加速計画に目途が立った。
- 9月:この頃、推進時間が1,000時間を超えた。この時点で地球より52,000 km後方を飛行中であった。
- 11月4日:観測史上最大規模X28の太陽フレアに遭遇した[注釈 47]。フレア放射を浴びた太陽光パネルは回復不可能な劣化を生じ、今後、発電出力が低下する事態となった。搭載メモリの「シングルイベントアップセット」と呼ばれる外部放射線に起因する一過性のエラーが発生したが、失われたコンピュータプログラムを地球から再送信することで対応出来たので、演算処理に関しては影響はほとんどなかった。太陽電池パネルによる発電量がIES推進力であるため、ソーラーセル劣化はそのまま加速能力低下を意味していた。この後、時間を掛けて軌道計画を再検討した結果、イトカワ到着予定は2005年6月から同年9月へ3か月伸び、イトカワからの出発も10月から同年12月へ変更された。
- 2004年
- 3月14日:2か月ほど先のEDVEGAの実施に備えて、IESを停止、1週間以上掛けた軌道決定作業へ入った。その後、4月20日・5月12日にRCSを用いて軌道微調整を実施した。
- 5月19日:イオンエンジンを併用した地球スイングバイ (EDVEGA) に世界で初めて成功した[注釈 48]。地球への最接近時の高度誤差は1km以下という高い精度だった。一時的に地球の影へ入った機体は搭載したリチウムイオン蓄電池によって電源がまかなわれた。
- 10月:太陽光パネル発電出力低下に伴い、地球との通信時間帯には稼働しているイオンエンジン1基を停止させ電力を通信機に融通し、通信終了後には電力をイオンエンジンへ供給する運用を行った[46]。
- 12月9日:イオンエンジンの積算稼働時間が2万時間を突破した。
- 2005年
- 2月18日:遠日点(1.7天文単位)を通過。イオンエンジンを搭載した宇宙機としては世界で最も太陽より遠方へ到達した。
- 7月29日 - 30日・8月8日 - 9日・8月12日:搭載されたスタートラッカー(星姿勢計)により小惑星「イトカワ」を捉え、計24枚の写真撮影を行った。これらの画像と地上からの電波観測により精密な軌道決定を行った。
- 7月31日:リアクションホイール(RW)3基のうちx軸周りを担当していた1基が故障、回転しなくなった[注釈 49]。残る2基による姿勢維持機能へ切替えて飛行した[注釈 50]。
- 8月:前半はRW故障対応で暫くIESによる加速を中断していたのを補うために、後半はIES3基による全力加速を継続的に行った。
- 8月28日:イオンエンジンを切り、イトカワへの接近に備えた。
イトカワの観測・着陸
[編集](時刻は全てJST)
- 2005年
- 9月4日:点状ながら初めてイトカワの形状を撮影。イトカワ自転周期が予想通り約12時間であることを確認。さらに、レーザー高度計送信試験に成功。9月10日の撮影では、イトカワの細長い形状をはっきり捉えた。
- 9月12日:イトカワと地球を結ぶ直線上で、イトカワから20 kmの位置(ゲートポジション)に到達した。これにより公式にイトカワとのランデブー成功となった。イトカワの観測結果によって着陸候補となる場所が見当たらないほど岩ばかりのゴツゴツした表面であることが判明した。
- 9月30日:イトカワから約7kmの位置(ホームポジション)まで接近し、近距離からの観測モードに移行した。
- 10月2日23時8分:y軸リアクションホイール停止。残ったRWはz軸1基のみであり、RCSを併用して姿勢制御を行う必要に迫られた。RCS液体推進剤は往路を終えたこの時点で約2 / 3がまだ残っていたので、直ちに推進剤不足となる不安は余りなかったが、精密な姿勢制御が行えなくなったことで、HGAによる地球との高速データ通信が不可能となり、MGAによる通信へ切替えられた。この時点で、地球より3億 km遠方にいるはやぶさとの通信は、34分の往復時間が掛かった。
- 10月28日:帰還用推進剤確保のために消費削減が求められていたが、RCS噴射を精度良く制御する目処が立った。これにより予定通りサンプル採取実施が決まった。
- 11月4日:1度目のリハーサル降下実施。着陸前の準備としてイトカワへ接近しながら航法や探査といった各種機能を試験する着陸リハーサルであったが、自律航法機能を使って700 mまで接近したところで予定の軌道を外れ始めたため、リハーサルは中止された[注釈 51]。
- 11月9日:2度目のリハーサル降下で高度75 mまで接近。時間を掛けてゆっくりと降下するため、日本臼田局だけでなくマドリード通信所との連携作業も試され、上手く通信切替が行えた。ミッション関係者の名前が入ったターゲットマーカーが正常に分離され、予定通り虚空に消えた。フラッシュランプもテストされ、良好な結果を得た。また、画像も撮影したため、地球側で受信後、ウーメラ砂漠ではなくミューゼスの海に2回の着陸を試みることが決まった。
- 11月12日:3度目のリハーサル降下を行い、高度55 mまで接近した。探査機「ミネルバ」を投下した。搭載機器は順調に機能していたが、重力補償のためのスラスタ噴射の途中で分離してしまったため探査機は上昇速度を持ち、イトカワへの着陸は失敗した。このリハーサルでは、降下誘導にLIDARが使用出来ず、自律的な画像認識による誘導も機能しないため、新たに「地形航法」という手法を考案して試してみた。また近距離レーザー光度計LRF動作確認も行った。何より大きな違いは、太陽発電パドルに太陽光の圧力を受けることで降下速度を時速100 mほどとごく低速にしたことであった。ミネルバ投下失敗は、元々太陽光による圧力やイトカワの引力ではやぶさが降下している間に分離が行われる予定でいたが、指令コマンド順番をミネルバ分離命令直前に、降下速度を抑えるためのRCS噴射命令を入れて送信してしまうという人為的ミスによって、はやぶさが上昇を始めた直後にミネルバを分離してしまったことで発生した。
- 11月20日:高度約40 mで88万人の名前を載せたターゲットマーカーを分離した。マーカーはイトカワに着地した。予定通り1回目のタッチダウンに挑戦した。はやぶさは降下途中に何らかの障害物を検出し自律的にタッチダウン中止を決定して上昇開始したが、再度秒速10 cmで降下を始めた。はやぶさは2回のバウンド(接地)[注釈 52] を経て、約30分間イトカワ表面に着陸した。この際は受信局切替でビーコンが受信出来ない時間帯であったため、地上局側は着陸の事実を把握出来ておらず、通信途絶が長過ぎることを不審に思った管制室の緊急指令で上昇、離陸した[47]。地球と月以外の天体において着陸したものが再度離陸を成し遂げたのは世界初であった。タッチダウン中止モードが解除されないまま降下したため弾丸は発射されなかったが[注釈 53]、着陸の衝撃でイトカワの埃が舞い上がり、回収された可能性があるとされた[50][注釈 54]。
- 11月26日:2回目のタッチダウンに挑戦。新たにマーカーを投下すると2つの目印を見て混乱する可能性があるため新たなマーカー投下を止め、また前回のマーカーも確実に検出出来る保証はないので、マーカーによる制御はせず記録モニターのみの設定とした。降下中に前回投下した署名入りターゲットマーカーをイトカワ表面上に確認[51]。日本時間午前7時7分、イトカワに予定通り1秒間着陸し、即座にイトカワから離脱した。なお、地球へ帰還したカプセルの中身のうち、2010年11月16日までにイトカワ由来と断定された約1500個の微粒子はこの際回収されたものである[注釈 55]。2回目離脱後の9時過ぎ、スラスタ噴射によりイトカワより5 kmの位置で静止した。この時、B系2番スラスタから燃料のヒドラジンが探査機内部へ漏洩していることが判明した。弁を閉鎖し漏洩は止まった。
- 11月27日:化学推進スラスタ噴射を試みたが、小さな推力が観測されただけであった。この時、燃料が漏洩したため気化による温度低下でバッテリー機能が低下し電源が失われたために、結果として搭載システムが広範囲に再起動されたと推定されている。姿勢制御スラスターは2系統(A / B)とも推力が低下し、はやぶさの姿勢は大きく乱れた。
交信途絶・帰還
[編集](時刻は全てJST)
- 2005年
- 11月28日:通信途絶。
- 11月29日:LGAによる低速度通信が回復した[52]。
- 12月2日:再びRCSの使用を試みたが、小さな推力が観測されただけであった。
- 12月3日:スピン軸が太陽方向に対して30度ずれていることが確認[注釈 56]。緊急時の対処として、イオンエンジンの推進剤であるキセノンガスを中和器から直接噴射することで姿勢制御を行うこととした。運用ソフトウェア作成開始。
- 12月4日
- 運用ソフトウェア完成。キセノンガスの直接噴射による姿勢制御を試みた。姿勢制御に成功した[注釈 57]。
- 姿勢が修正されたため、MGAによる256 bpsの通信が回復2回目のタッチダウンに関わるデータが送信され始めた。
- 12月7日:受信データ解析の結果、11月26日の着陸シーケンス中に弾丸発射中止のコマンドが見付かり、サンプリング用弾丸は発射されていなかった可能性が高くなった[注釈 58][注釈 59][53]。成功と発表されていた着陸が、失敗に終わっていた可能性が高いと修正し発表された。
- 12月8日:機体はみそすり運動を始め、キセノンガスを使っても姿勢を回復出来なかった。以前に漏れていた燃料が気化して噴出した可能性が考えられたが、原因は特定されていない。通信が途絶した[注釈 60]。
- 12月14日:地球への帰還予定は2010年6月に延期することが発表された[注釈 61][54]。
- 2006年
- 1月23日:はやぶさからのLGAによる低速度通信電波が辛うじて受信。
- 1月26日:「1ビット通信」によって状況が次第に明らかとなった[注釈 62]。12月8日の姿勢制御喪失後、太陽電池パネルからの発電量が低下し、一旦は電源供給が失われた。リチウムイオン充電池は11セルすべてが放電し切った状態であり、その内の4セルは過放電によって充電能力を失っていた。また、RCSの推進剤は、11月のトラブルで燃料をほとんどを失っていたが、さらに酸化剤も12月以降のトラブルで失われていた。イオンエンジン用のキセノンガスは、トラブル前の圧力を保っていて、残量は42 - 44 kgと推定された。回転を止めるためにまだ稼動するz軸のリアクション・ホイールが使用され、さらに中和器からのキセノンガス噴射が行われた。
- 2月25日:自転数が緩和されたことで、LGAによる8 bpsでのテレメトリーデータの受信が可能となった。
- 3月4日:おおよその姿勢制御に成功。MGAによる32 bpsでのテレメトリーデータの受信が可能となった。
- 3月6日:3か月振りに位置や速度が特定され、地球からは3億3,000万km、イトカワからはその公転方向に1万3,000 kmの所を秒速3 mで離れつつあることが明らかになった。
- 3 - 4月:構体内部へ漏洩し滞留している可能性がある燃料などを追い出すために、ベーキング作業を行った。
- 5月31日:イオンエンジンB・D起動試験成功。
- 7月:姿勢制御に使用していたキセノンガスの消費量を抑えるため、太陽光圧を利用(ソーラーセイルと同じ原理)したスピン安定状態での運用に切り替えた[注釈 63]。
- 7 - 9月:採取試料容器を地球帰還カプセルに格納する作業には、リチウムイオン充電池の電力が必要であるため、使用可能なセルに充電をはじめた。9月に充電を完了し、以降は充電状態を維持した。
- 2007年
- 1月17日:採取試料容器を地球帰還カプセルに格納する作業をはじめた。翌18日未明に格納作業完了を確認した[注釈 64][55]。
- 4月20日:スラスタB・Dによる2基同時運用からスラスタDによる単独運用へ変更[注釈 65]。
- 4月25日:地球帰還に備えて巡航運用開始[56]。巡航運転に先立ち、姿勢制御プログラムの書き換えを行った[注釈 66]。
- 7月28日:スラスタCのイオンエンジンが推力を生んだ。スラスタDを温存のため停止してCの単独運転に切り換えた[57]。
- 10月18日:復路第1期軌道変換が完了した。イオンエンジンおよびリアクション・ホイール(RW)を停止、太陽指向スピン安定モードへ入った。ここまでのイオンエンジン稼働時間は、往路・復路あわせて延べ31,000時間、軌道変換量は1,700 m/sに達する。復路の軌道変換量は残り400 m/sである[58]。
- 2008年2月28日:3回目の遠日点通過1.63 AU)[59]。
- 2009年
- 2月4日:リアクション・ホイールを駆動し、イオンエンジン(スラスタD)を用いて動力飛行(復路第2期軌道変換)を開始した[60]。
- 8月13日8時30分:イオンエンジンを停止し、セーフホールドモードへ移行しているのが発見された。原因は宇宙放射線による姿勢監視装置のシングル・イベント・アップセット(SEU)と推定された。軌道は少し変更されるが地球帰還に問題はなかった。遠日点付近であるため、電力事情が改善されるまでは太陽指向スピン安定制御による慣性飛行で運用された[61]。
- 9月10日:遠日点通過。
- 9月26日:イオンエンジンを使用して動力飛行を再開した。
- 11月4日:1基のイオンエンジン(スラスタD)が中和器の劣化によって自動停止した[62]。
- 11月11日:打上げ後から予備機として使用していなかったスラスタA中和器と、2007年4月より使用停止していたスラスタBのイオン源をバイパスダイオードによって接続し使用する複合モード運用を始めた[63][注釈 67]。
- 12月27日:イオンエンジン停止。VLBI観測によって精密な軌道を同定した(2010年1月1日まで)。
- 2010年
- 1月13日:地球引力圏内を通過することが確実となった。
- 2月26日:月よりも内側(約31万 km)を通過する軌道に入った[64]。
- 3月5日:対地高度約16万 kmを通過する軌道へ入った。イオンエンジンを一旦停止し、軌道の精密測定を実施した。
- 3月20日:対地高度約4.6万 kmを通過する軌道に入った[注釈 68]。
- 3月27日:復路第2期軌道変換を終了した。地心距離約2万 km(高度約1万4,000 km)を通過する軌道に入った。
- 4月4日:地球外縁部への精密誘導を実施した(TCM-0、4月6日まで)。
- 5月1日:精密誘導に伴う補正のために減速して到着時間を調整した(TCM-1、5月4日まで)。
- 5月12日:スタートラッカーが地球と月を捉えた。
- 5月23日:地球外縁部(高度約630 km)への精密誘導のため、接線加速と太陽方向への加速を実施した(TCM-2、5月27日まで)。
- 6月2日:オーストラリア政府が同国内ウーメラ立入制限区域(Woomera Prohibited Area, WPA)へのカプセル落下を許可。
- 6月3日:地球外縁部からウーメラ立入制限区域への誘導目標変更のため、軌道補正を実施した(TCM-3、6月5日まで)。
- 6月9日:落下予測範囲を狭めるため、さらに詳細な誘導を実施した(TCM-4、12時30分 - 15時)。この軌道修正で、6月13日23時頃に南オーストラリア州にあるウーメラ立入制限区域の東西100 kmほどの地域内に落下することが確実となった。同区域を通過するスチュアート・ハイウェイは13日22時から0時まで通行止めとされた。この時点で地球までの距離は約190万 kmであった。
- 6月13日
| 画像外部リンク | |
|---|---|
|
ISAS/JAXA 2010年6月18日公開[67] |
{kind=link}
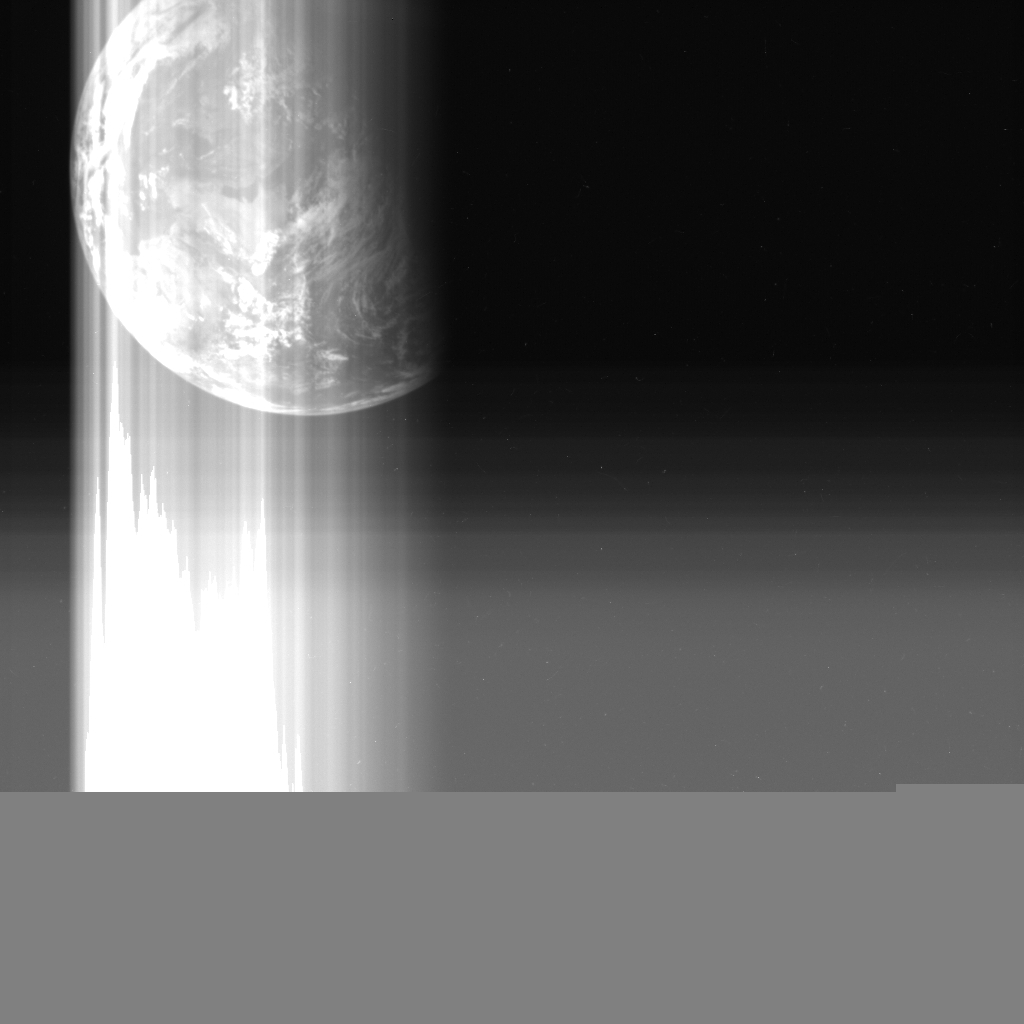
はやぶさはカプセルを分離した後、最後に地球を撮影するミッションを行った[29]。このミッションは当初から予定されていたものではなく、開発者たちの「最後に故郷の地球を見せてあげたい」という思いから行われた[68][69]。イトカワ観測終了後、カメラとその保温ヒーター電源は長時間切られたままで健全性が不明であった。また、カプセル分離まではそれに適した姿勢に保つ必要があり、分離機構が不調の場合にはカメラを地球に向けての写真撮影はできないと思われていた[70]。しかし、カプセルの切り離しに順調に成功したため、カプセル取付面に対して側面にある広角カメラ(ONC-W2)[67][71] を地球方向に向くよう姿勢を変更した。カプセル分離の反動でふらつく機体姿勢を、イオンエンジン推進剤直接噴出と1基だけ残ったリアクションホイール(RW-Z)によって立て直し、2時間かけて[72] 機体を回転させた[73]。そして13日22時2分頃までに地球を5 - 6枚撮影し、データを地上に送信した。そのほとんどは真っ暗なものでしかなかったが、送信の最中に通信が途絶して写真下部が欠けていた最後の1枚の写真が、ぎりぎりで地球の姿を捉えていた[70][72][74][75]。
2003年5月9日の打上げより7年。姿勢制御用のリアクションホイールは3基中2基、化学燃料スラスタは全て故障。バッテリは放電し切っているため、太陽電池パネルが太陽方向より逸れると即座に電源断となる状態。故障したスラスタ同士を繋いで復活させたイオンエンジンもいつ止まるかわからず、搭載されたコンピュータすらビット反転を起こし始めているという、まさに満身創痍の帰還であった。実際に使用されることはなかったが、最後のリアクションホイールが故障した場合の対策も用意されていた[76]。
大気圏再突入
[編集]
6月13日22時51分頃[4][66] 惑星間軌道から直接12km/sの相対軌道速度[77][注釈 70] で、はやぶさ本体およびカプセルは大気圏再突入した。流星のように輝きながら無数の破片に分解し、燃え尽きていくはやぶさ本体と、一筋の光の尾を曳いて飛び続ける再突入カプセルは、南オーストラリア州においては数十秒間に渡り地上から肉眼でも観測され、満月の倍の明るさに相当するマイナス13等級の輝きを発し[78]、人の影が地面に映るほどの明るさとなった[79]。 事前予想では、大気圏再突入時の光跡は最大で-5等級程度と報道されていたが[80]、後の記者会見では、この予想ははやぶさ本体を含まない、再突入カプセル単体の明るさを指した予想であったと訂正された[81]。
22時56分[66]、カプセルからの電波信号(ビーコン)が受信され、パラシュートが開いたことが確認された。カプセルは23時8分頃に着陸したと推定される[66]。着陸予想地点の周囲に展開した方向探測班がビーコンの方向から落下位置を推定し、発熱による赤外線を頼りに[82]ヘリコプターによる捜索が行われ、13日23時56分、再突入直前の予想地点から1 kmほどのウーメラの北西約200 kmで目視により発見された[4][82][83][84]。
現地の砂漠一帯は先住民アボリジニーの聖地でもあるため、14日午前にアボリジニーの代表がヘリで現場を視察し、了解を得た後、宇宙機構チームがカプセル回収へ向かった[82]。カプセルに付いている火薬などの危険物が安全な状態かどうかを調べた後、カプセル回収作業を開始し、約4時間後に回収を完了し[85]、専用コンテナで現地の拠点施設まで移送された[86]。また、探索されていたヒートシールドも14日14時頃に発見され[5]、翌日に回収された。
なおこれ以前にも日本の宇宙機が自力で大気圏再突入に耐えた例はいくつかあるが、回収まで予定通りに成功したのは2003年に回収されたUSERS回収カプセル以来7年振り2度目。旧ISASが打上げた衛星・探査機としては初の回収成功となった(失敗後に偶然回収されたEXPRESS除く)[注釈 71]。大気圏再突入時の最大減速率は50G程度で、再突入から約150秒後には秒速数十 mまでの減速が行われた[77]。
NASAはJAXAなどと共同で、観測用航空機「DC-8」から19台のカメラで「はやぶさ」の大気圏再突入を撮影した[87][88]。はやぶさは惑星間航行をしていたので、歴史上2番目の速度で大気圏再突入が行われ、カプセルは1 - 2万度の高温にさらされた[66][89][注釈 72][注釈 73]。NASAの支援としてはこの他に、ディープスペースネットワークによるはやぶさの追跡支援、エイムズ研究センターの大型加熱風洞を用いた再突入カプセル耐熱シールド試験があった[91][注釈 74][91]。
カプセル輸送と分析
[編集]
発見されたカプセルは、ウーメラ施設内のクリーンルームで爆発の危険性がある装置と電子回路を取除いた後[85][92]、窒素を満たしたポリエチレンの袋に入れた上で内箱に収納。さらに衝撃吸収用ボールを並べた免震箱に入れて熱シールドと共にチャーター機で日本に輸送され[93][92]、17日深夜に羽田空港に到着した[93][92]。18日2時にトラックでJAXA相模原キャンパスのキュレーションセンターに搬送された[90][92][注釈 75][注釈 76]。カプセルはX線断層撮影 (CT) 検査を行うため一旦JAXA調布キャンパス飛行場分室に移送され、検査の結果容器に亀裂などがないことが確認された[注釈 77][96]。昼夜連続でカプセルの清掃が行われ、20日にはサンプルコンテナがクリーンチェンバーに導入された[96]。22日にサンプルコンテナが開封され、内部から微量のガスが採取されたが、大部分が地球大気由来の気体であった[96][注釈 78]。24日には、サンプルキャッチャーA室開封作業に着手した[90]。
7月5日、JAXAはカプセル内のサンプルコンテナから肉眼で確認出来る直径1 mmほどの微粒子十数個と、サンプルキャッチャーA室内壁より直径10umほどの微粒子2個を顕微鏡で確認したと発表した[99]。その後、調査範囲を広げるにつれて発見される粒子の数も増えて行った[100][101]。カプセル内の微粒子はマニピュレーターで1粒ずつガラス容器に移して詳細に検査する予定であり[99][96]が、事前に行ったリハーサルより粒子が小さく効率が悪かったことから[102][103]、電子顕微鏡で観察できるサイズのテフロン製ヘラと純窒素チャンバーを開発し、地球大気による汚染を遮断した環境下で[104] 容器の壁面をこすって微粒子を採取するようにしたところ、10 um以下の微粒子を約3,000個捕獲することができた[102][105]。
11月16日までにA室内より回収した微粒子のうち約1,500個が岩石質であった。回収された微粒子が地球上で混入したものなのか、イトカワ由来なのかはキュレーションセンター内での簡易分析だけでは判断出来ないと考えられていた[99] が、X線分光分析の結果、組成が地球上の岩石では見られないLL4-6コンドライト隕石の組成と一致した[106]。イトカワの観測結果から、イトカワはLLコンドライトと近い物質であると推定されていたことから大部分がイトカワ起源と判断され[107]、11月16日に公表された[6]。12月7日にサンプルキャッチャーB室を開封した[108]。
テフロン製ヘラによる採取では、微粒子がヘラに付着して取れなくなってしまうことから、サンプルキャッチャーをひっくり返して振動を与え、合成石英ガラス製の円盤に粒子を落下させる方法(自由落下法[109])が考案され、大きなもので300マイクロメートルを超える粒子を回収することができた[107]。また、ガラス円盤に付着した試料は静電制御によるマイクロマニピュレーターによりひとつずつ拾い集められた[104]。2013年3月15日までに400個ほどの粒子が回収され、元素組成によってカテゴリー別に分類され1つずつ保管されている[107]。回収した粒子は初期分析のため各研究機関に配付された他、NASAや公募によって決まった各国の研究機関でより詳細な分析を行い[84]、さらに一部のサンプルは分析技術の進歩に期待して保存する予定である[92]。
粒子の初期分析は当初予定の8月以降から9月以降、さらに12月以降[110] へと延期され、ようやく2011年1月21日にSPring-8で最初の初期分析が始められた[109][111][112]。3月にはアメリカで開かれた第42回月惑星科学会議で初期分析の中間報告が発表された[113]。
カプセルの一般公開
[編集]役割を果たした再突入カプセルのヒートシールドやパラシュートなど、および地上試験用のエンジニアリングモデルは、2010年7月末から8月にかけて以下の場所で公開された[115]。一般公開の初日には1万3千人の来場者が詰めかけ、最大で3時間待ちにもなる長蛇の列をつくった[116]。
- 7月30、31日
- 8月2 - 6日(ヒートシールドは2、3日のみ)
- 8月15 - 19日(ヒートシールドは15、16日のみ)
その後も引き続き各地で公開されていたが[117]、ヒートシールドは研究解析に供されるため[118] 展示されない場合もあった。なお、ヒートシールドの形状は重要機密事項であったらしく、少なくとも筑波宇宙センターで見学者へ配布された資料ではヒートシールド輪郭が塗り潰されていた。
- 2010年8月26 - 30日
- 2010年9月2日(ヒートシールド展示あり)
- 豊洲IHIビル1F(東京都江東区)
- IHIテクノフォーラムに合わせて公開。一般公開は午後のみ。
- 豊洲IHIビル1F(東京都江東区)
- 2010年9月11・12日
- 2010年9月17 - 21日
- 2010年10月2・3日
- 調布航空宇宙センター(東京都調布市)
- 2010年10月14 - 18日
- 2010年10月26日 - 11月7日
- 2010年11月13日には、横浜市で開催されたAPEC首脳会議に参加した各国首脳の晩餐会会場で展示された。
- 2010年11月20 - 23日
- 2010年11月27 - 30日
- 2010年12月4 - 5日
- 内之浦宇宙空間観測所(鹿児島県肝属郡肝付町、ヒートシールド展示あり)
- 2010年12月8 - 12日
- 2010年12月17 - 19日
- 2010年12月22 - 26日
- 2011年1月8 - 12日
- 2011年1月15 - 18日
- 2011年1月21 - 24日
- 2011年1月27 - 31日
- 神戸市立青少年科学館(兵庫県神戸市)
- 2011年2月2 - 6日
- 2011年9月15 - 19日
- 2011年11月23 - 27日
- 2012年3月2 - 6日
- 菊池市総合体育館(熊本県菊池市)
2010年7月の相模原キャンパス特別公開を皮切りに同年11月からは本格的に各地を巡回し、最後の会場の愛知県刈谷市で2012年4月3日限りで全行程を終了した。全69会場で延べ89万人の来場者数を記録した[119]。
これとは別に、再突入カプセルを製作したIHIエアロスペースの工場が群馬県富岡市にある縁で、同社は2010年10月に実物大レプリカを群馬県に寄贈しており、県内で巡回展示された後にぐんま天文台で2011年1月15日から常設展示されている[120][121]。
受賞歴・記録
[編集]- 受賞
- 2006年
- 2007年
- 4月:文科省より、「はやぶさ」プロジェクトチームに対し、平成19年度科学技術分野の文部科学大臣表彰 科学技術賞(研究部門)。受賞業績名「はやぶさのイトカワへの降下と着陸及び科学観測に関する研究」
- 7月:米国航空宇宙学会より、論文「Powered Flight of HAYABUSA in Deep Space」(はやぶさ小惑星探査機の深宇宙動力航行)(AIAA Paper 2006-4318) に対し、米国航空宇宙学会最優秀論文賞。
- 9月:電気ロケット推進学会より、論文「Asteroid Rendezvous of HAYABUSA Explorer Using Microwave Discharge Ion Engines」(マイクロ波放電式イオンエンジンによるはやぶさ探査機の小惑星ランデブー)(IEPC-2005-10)に対し、国際電気推進学会最優秀論文賞。
- 2010年
- 2011年
- 世界初記録
- マイクロ波放電型イオンエンジン運用
- 宇宙用リチウムイオン2次電池運用
- イオンエンジンを併用した地球スイングバイ
- 月以外の天体からの地球帰還(固体表面への着陸を伴う天体間往復航行)
- 月以外の天体の固体表面からのサンプルリターン
- 地球と月以外の天体からの離陸(着陸と離陸としては最小の天体)
- 世界最遠記録
- 遠日点(1.7 AU)を通過。イオンエンジンを搭載した宇宙機としては、太陽より史上最も遠方に到達(なお、2010年4月15日現在ではドーンが太陽から約2億9260万 km=約1.96 AUへ到達している[125])
- 光学的手法により、自力で史上最も遠い天体への接近・到達・着陸・離陸
- 世界最長記録
- 最も長い期間を航行し、地球へ帰還した宇宙機(2,592日間)
- 最も長い距離を航行し、地球へ帰還した宇宙機(60億 km)(但し、確認中)[126]。
- 最も長い時間、動力飛行をした宇宙(但し、確認中)[126]。
関連する世界初
[編集]- 初の地球外天体からのサンプルリターンは1969年のアポロ11号による月の石で、これは有人月探査であった。無人探査機によるものでは翌1970年の旧ソ連の月探査機ルナ16号が初である。月より遠くからのサンプルリターンとしては、ラグランジュ点L1から2004年に帰還したジェネシスが初である。さらに地球重力圏外にある遠くの天体よりサンプルリターンを行った探査機としては、2006年にカプセルを帰還させた彗星探査機スターダストが初である。但し、後2者はアポロやルナのように天体の固体表面に着陸したものではなかったため、はやぶさは地球重力圏外の天体固体表面に着陸してサンプルリターンを行った初の探査機ということとなった。無論、小惑星からのサンプルリターンは初である。
- はやぶさは小惑星探査機として数々の新技術を実証しているが、初の小惑星探査機は近接探査という意味では1991年にガスプラを探査したガリレオである。また小惑星を専門とする初の探査機は1996年打上げのNEARシューメーカーであり[注釈 80]、これは初の小惑星周回(ランデブー)と軟着陸を行っている。そのためはやぶさは初の小惑星より離陸・帰還した探査機ということとなった。また、イオンエンジンをメインエンジンとする初の小惑星探査機は、1998年打上げのディープ・スペース1号であり、はやぶさはあくまで新方式のイオンエンジンを実証した探査機である。
記念日
[編集]6月13日を銀河連邦が「はやぶさの日」(英: HAYABUSA DAY)に制定。2012年5月28日に日本記念日協会から認定を受け、登録された[127]。
プロジェクト参加企業
[編集]以下の表は、開発・運用・回収サンプル解析に関わった企業を中心にまとめられた、主な「はやぶさ」関連企業の一覧である。
| 会社名 | 業務 |
|---|---|
| IHIエアロスペース | 探査ロボット「ミネルバ」・回収カプセル開発 |
| IHIエアロスペース・エンジニアリング | 回収カプセル筐体加工・設計支援など |
| アイティティキャノン | マイクロD-Subコネクタハーモネスの販売 |
| アイネット | 探査機電気試験装置ソフト開発・計装・総合試験・初期運用 |
| イーグル工業 | 化学推進スラスタ・イオンエンジン推進剤供給系用各種バルブ販売 |
| 猪口鉄工所 | 化学推進スラスタ・イオンエンジン推進剤燃料タンク機械加工・精密部品製作 |
| 宇部興産(現・UBE) | サーマルブランケット・熱制御材(放射率可変素子)材料製造 |
| エスペック | 電子部品信頼性検査支援 |
| NEC | 探査機システム・地上システム開発取りまとめ・運用 |
| NECエンジニアリング | 探査機システム設計および搭載機器開発設計 |
| NEC航空宇宙システム | 探査機システム設計および軌道計算・衛星管制システム開発・運用 |
| NEC東芝スペースシステム | 探査機開発・設計・製作・検査 |
| NECトーキン | イオンエンジン用磁気回路製造 |
| NECネッツエスアイ | 運用管制業務および地上関連設備運用業務 |
| NECワイヤレスネットワークス | 姿勢制御系搭載機器電源・ハイブリッドIC製造 |
| NTN | 太陽電池パドルのヒンジ部軸受の製造 |
| エフ・アイ・シー | 探査機からの受信データの取得・蓄積・伝送 |
| エムエイチアイオーシャニクス | 化学推進スラスタ・イオンエンジン用推薬充填 |
| オーケープリント | プリント基板設計・製造 |
| 沖エンジニアリング | 探査機電子部品信頼性検査・評価・解析・スクリーニグなど |
| 薫製作所 | 探査機部材精密機械加工 |
| 川邑研究所 | 探査機部材表面処理(固体被膜潤滑) |
| キットセイコー | 搭載機器用特殊ネジ製造 |
| 京セラ | リチウムイオン電池用電池蓋製造 |
| 共和電業 | ゲージ類製造 |
| コーデック | データレコーダなどの探査機搭載電子機器試験装置開発・製造 |
| コクサイエアロマリン | 回収カプセルなど日本 - オーストラリア間輸送 |
| コスにじゅういち[128] | サンプル回収機構(装置)部品を加工 |
| サカセ・アドテック | 探査機中・低利得アンテナや導波管コンポーネント開発・製造、主鏡用3軸織製造 |
| 櫻護謨 | イオンエンジン推進剤供給用配管・配管フランジ製造 |
| 三栄産業 | 探査機部材精密部品切削加工 |
| シーイーシー | 追跡管制ネットワーク構築・運用 |
| ジェピコ | 電子部品輸入販売 |
| 塩野製作所 | イオンエンジン金属部品切削加工 |
| 清水機械 | サンプル採取装置試作 |
| 下平製作所 | 回収カプセル分離スプリング部品加工 |
| ジャパンマシナリー | 搭載計器などの温度管理用ヒーター製造 |
| ジュピターコーポレーション | 探査機部品輸入販売 |
| 潤工社 | 機体電線・ケーブル製造 |
| 昌新 | 電子部品・マイクロ波部品輸入販売 |
| 昭和オプトロニクス | イトカワ観測用色補正望遠鏡光学系などの開発 |
| 昭和飛行機工業 | 機体構体パネル製造 |
| 信州航空電子 | 加速度計センサの部材などの製作 |
| 新日本産業 | 精密測定機器などの販売 |
| スーパーレジン工業 | 炭素繊維強化プラスチック製タンク支持ロッド |
| 鈴幸商事 | 熱制御部材販売 |
| 須田製作所 | 探査機組立用治具などの製作 |
| 住金日鉄ステンレス鋼管 | 化学推進スラスタ構造部材・配管素材(ステンレス)製造・販売 |
| 住友重機械工業 | サンプル採取装置開発 |
| 住友スリーエム | ターゲットマーカー用再帰性反射材開発 |
| ソレキア | 地上データ伝送系システムハードウエア保守 |
| 大興電子通信 | 軌道系システム開発・運用 |
| タイコエレクトロニクスジャパン | 探査機部品輸入販売 |
| 太陽金網 | 電磁干渉シールドテープ製造 / スラスタ部分放熱対策 |
| 大陽日酸 | イオンエンジン耐久試験設備製作 |
| 高橋工業 | サンプル採取装置部品加工 |
| 多摩電気工業 | 探査機の抵抗器製造 |
| 長菱エンジニアリング | 化学推進スラスタ・イオンエンジン推進剤供給系機械環境試験・耐圧試験など |
| 長菱設計 | 化学推進スラスタ開発・設計支援 |
| 東京通信機材 | ワイヤーカッター用金属部品加工 |
| 東侊製作所[128] | サンプル採取装置部品加工 |
| 東洋炭素 | イオンエンジン用加速グリッド製造 |
| ニチコン | フラッシュ用コンデンサ宇宙使用化 |
| 日油技研工業 | 弾丸発射装置(プロジェクタ)・ワイヤーカッター開発 |
| 日経エンジニアリング | 精密部品組立支援 |
| 日本アビオニクス | 部品実装用プリント基板販売 |
| 日本カーボン | 回収カプセル断熱材プリプレグ供給 |
| 日本航空電子工業 | 加速度計センサ開発 |
| 日本飛行機 | サンプラーホーン進展部・回収カプセル分離スプリング開発 |
| 日本マルコ | コネクタ・ハーネス製造 |
| HIREC | 探査機用部品の供給 |
| パナソニック | 回収カプセルビーコン発信用電池(リチウム1次電池)の開発・製造など |
| 浜松ホトニクス | 近赤外分光分析用高感度イメージセンサ開発 |
| 林電工 | タンク用温度センサ(地上支援装置)製造 |
| 原田製作所 | 弾丸発射装置(プロジェクタ)用金属加工部品製造 |
| 日立製作所 | データレコーダ、サンプル分析用クリーンチャンバなどの製造・全体システム制御など |
| 日立ハイテクノロジーズ | サンプル分析用電子顕微鏡システムなどの製作 |
| 日立プラントテクノロジー | サンプル分析用クリーンルーム販売 |
| 福岡酸素 | 燃料タンク耐圧・気圧試験 |
| 藤倉航装 | 回収カプセル用パラシュート開発 |
| 富士精工 | バッテリ単電池ケース部品作成 |
| 富士通 | 軌道決定、衛星情報ベースや衛星異常監視・診断システム開発 |
| 富士通アドバントエンジニアリング | NASAと追跡管制相互運用を行う伝送系開発・運用 |
| 富士通エフ・アイ・ビー・システムズ | テレメトリ監視および伝送系システム開発・管理 |
| 富士通特機システム | 探査機データ伝送系システム機器保守 |
| 古河電池 | リチウムイオンバッテリ開発 |
| 平和産業 | アルミ製分離機構部位機械加工 |
| ホシノ工業 | パラシュート吊索・ひも・補強テープ材料製造 |
| 松田技術研究所 | 回収カプセル移送用簡易コンテナ機密性確保と制振 |
| ミカローム工業 | 化学推進スラスタアルミ部材表面加工 |
| ミツイワ | 地上データ伝送システム運用とハードウエア保守 |
| 三菱重工業 | 化学推進スラスタ・イオンエンジン推進剤供給系開発 |
| 三菱電機 | 運用管制用大型パラボラアンテナ運用 |
| 三菱電線工業 | 化学推進スラスタ・イオンエンジン推進剤供給系シール部品設計・製造 |
| ミヤタエレバム | ターゲットマーカー識別用キセノンフラッシュランプ製造 |
| 三河製作所 | 回収サンプル評価・作業用クリーンチャンバ製作 |
| 武蔵富装 | パラシュートの収納袋布材料製造 |
| ムラコー[要出典] | サンプル採取装置部品加工 |
| 明星電気 | 蛍光X線分光装置などの開発 |
| 八欧産業 | ターゲットマーカー反射シート製作 |
| 山里産業 | 化学推進スラスタ・イオンエンジン燃料供給系試験用熱電対製造 |
| ユタカ[128] | サンプル採取装置部品加工 |
| 菱計装 | 化学推進スラスタ開発支援および地上支援装置製造 |
| 特別な脚注がない会社は全て[129] からの引用である。 | |
はやぶさ後継機
[編集]はやぶさ(MUSES-C)打上げ以前よりMUSES-C後継機構想はあり、小天体探査フォーラム(MEF)では後継機任務について、同じ小惑星族(コロニス族またはニサ族)に属する複数の小惑星を探査する案や、スペクトルが既知の地球近傍天体(NEO)複数を探査する案など、多数の案が検討された[130][131]。
2011年5月12日、はやぶさの改良機「はやぶさ2」が2014年に打上げ、地球近傍小惑星リュウグウを探査する計画が発表された。2014年12月3日に打ち上げられ、2018年にリュウグウに到着、2020年に帰還する計画が立案され[9][10]、計画通りに実行された。
「はやぶさ2」以降については、より大型・高性能な「はやぶさMk.II(マーク2)」、「はやぶさMk.II」をヨーロッパ宇宙機関と共同開発するという「マルコ・ポーロ」などの構想がある。
反応
[編集]複数の技術的なトラブルに見舞われ帰還を絶望視されつつも[132]、それを乗り越えて地球への帰還を目指すはやぶさの旅程は、多くの日本人に美談として受け止められ共感を呼んだ[133][134][135][136][137]。
天皇・皇后
[編集]天皇誕生日に先立つ2010年12月20日の記者会見で、上皇明仁は「はやぶさ」について次のように述べた。
小惑星探査機「はやぶさ」が小惑星「イトカワ」に着陸し、微粒子を持ち帰ったことは誠に喜ばしい今年の快挙でした。一時は行方不明になるなど数々の故障を克服し、ついに地球に帰還しました。行方不明になっても決して諦めず、様々な工夫を重ね、ついに帰還を果たしたことに深い感動を覚えました。 — 今上天皇、[138]
また上皇后は、はやぶさが大気圏に突入した時のことを和歌に詠んだ。
メディア
[編集]「はやぶさ」に対する関心は始めから大きかったわけではない。はやぶさの着陸失敗が非常に大きく取り上げられた後、実は着陸していたことが取り上げられた[141]。電波を捉えられなくなり、帰還が危ぶまれるようになるとほとんど報道されないようになった。マスメディアが関心を失って行く一方、インターネット上でははやぶさに関する話題盛り上がりがあり、次第に注目を集めて行った(詳細は「#インターネットによる広報と反響」を参照)。
2010年6月13日の地球帰還が近付くに連れてニュースやワイドショーで取上げられる機会も増え、6月10日にはNHKの『クローズアップ現代』で「傷だらけの帰還 探査機はやぶさの大航海」が放送された(JAXAの的川泰宣がゲスト出演)。NHKはウーメラに近いグレンダンボに取材班を送り、大気圏再突入の模様をハイビジョンで撮影して翌14日未明より定時ニュース冒頭で繰返し放送したが、NHK・民放各局とも生中継を行わず[142][143]、NHK広報局はツイッター上で「大気圏突入のタイミングには、丁度ワールドカップの試合を放送しているので、生中継は難しそうです」などと冷静に理解を求めていたのだが、第1報もやや遅れたため[142]、一部では放送局の反応に対する失望の声も上がった[142][144]。 翌日14日の朝刊各誌は1面トップに写真付ではやぶさ突入記事を掲載し[142]、民放各局もはやぶさの帰還を報道している[142][145]。またカプセルが着地したオーストラリアでは、大きな話題として扱ったテレビ放送局もあり[146]、台湾やイギリスなどでも報道された。
はやぶさ帰還後は、日本国民の熱狂振りや国民的な関心の高さがメディア上でも紹介された[147][148][149][150]。
政治家
[編集]はやぶさカプセル帰還成功を受け、6月8日に成立したばかりの菅内閣閣僚達からは絶賛する発言が相次いだ。
- 菅直人総理大臣(当時)は6月14日、「はやぶさ」プロジェクトマネージャー川口淳一郎にお祝いの電話を掛け、カプセル再突入成功について、約60億キロメートルもの飛行の後、地球へ帰還出来たことは奇跡的であり、日本の技術水準の高さを世界に強くアピールした、関係者の方々に心からのお祝いと労いを申し上げたい旨を述べた[151]。さらに15日の参議院本会議で、後継機「はやぶさ2」開発を推進する考えを示した[152]。
- 蓮舫行政刷新担当相(当時)は15日、「偉業は国民全員が誇るべきものだ。世界に向かって大きな発信をした」と高く評価し、2009年の事業仕分けで、後継機開発など宇宙開発関連予算を削減としたことについて「宇宙開発は私は直接担当しておらず、今一度流れを確認している」と釈明し、また「国民の様々な声は次期予算編成に当然反映されるべきだ」と語った[153]。
- 川端達夫文部科学大臣(当時)は15日、「非常に大きな成果を上げた」と評価し、後継機予算概算要求について「しっかりとこれを踏まえて考えたい」と前向きな姿勢を示した[154]。
- 福山哲郎官房副長官(当時)は14日、はやぶさの後継機開発について「宇宙技術発展への貢献を精査し、来年度予算での扱いを検討したい」と述べた[155]。
- 宇宙開発担当の前原誠司国土交通大臣(当時)も「宇宙開発史に画期的な一ページを加えた」との談話を発表した[156]。
これらの発言に対して、読売新聞は鳩山政権下ではやぶさ後継機予算が削減されていたことを指摘し、「現金すぎ」と民主党政権を批判的に報じた[156]。
インターネットによる広報と反響
[編集]はやぶさは、「星の王子さまに会いに行きませんか」キャンペーンを実施し、国内外から88万人の署名入りターゲットマーカーを積んでいたことで、投下成功のニュースには多くの励ましのメールがJAXAに届けられた[157]。
イトカワ着陸の際は、管制室インターネット中継や、ブログによる実況が行われた。2度目の着陸の際、栄養ドリンク「リポビタンD」の空き瓶が管制室の机にどんどん増えて行く様子[158] がブログを通して紹介され話題になった[159][160]。後にブログの更新担当者のもとには大正製薬関係者からリポビタンDが2カートン贈られたという[161]。
JAXAのWEBサイトでは、ミッション経過を絵本仕立てで紹介した『はやぶさ君の冒険日誌』やペーパークラフト[162] なども公開された。
2006年、soyuz project名義で活動する音楽家、福間創は、はやぶさの地球への無事帰還を願い、「swingby」という楽曲を自身のwebサイトで無料配信した[163][164]。配信後、この曲は相模原のJAXA宇宙科学研究本部の一般公開イベントにおいて、はやぶさコーナーのBGMとして正式に採用された[165][166]。
地球帰還へ向けて最後の軌道修正に入った2010年4月には特設ページが作られ、プロジェクトマネージャーの川口淳一郎を始めとする関係者達のメッセージが掲載された他、ブログやTwitterで状況が報告された。Twitterでは「はやぶさ君」“本人”がつぶやいたり、「あかつきくん」や「イカロス君」と会話することもあった[167]。
リアルタイムで多くの情報が公開されたことによりネットでの注目を集め、はやぶさを擬人化したキャラクターや、はやぶさをテーマにしたフラッシュ・MADムービー・楽曲などが作られた。ファンによるコスプレや実物大模型なども公開されてブームを盛り上げた[134][168][169]。後日、ASCII主催による、川口淳一郎教授と今回のプロジェクトチームを招いて、今回のミッションについての対談が行われた際、Twitterの果たした役割にふれ、またニコニコ動画上のさだまさしの『案山子』や『宇宙戦艦ヤマト』などをモチーフにしたFLASHムービー作品について、とてもよく出来ていて気に入っているという感想を述べて、「はやぶさ」とネットとの親和性は高いと評価した[159]。
2010年6月13日の大気圏再突入の際には、前述のように生中継を行った放送局が皆無であったのに対し[142][143]、動画配信サイトでは現地からのインターネット中継が行われ[170][171]、ニコニコ生放送に延べ21万人[133][142][172]、JAXA配信に36万アクセス、和歌山大学配信に63万アクセス[172] が殺到し、それぞれ視聴者数が制限されたり回線が繋がりにくくなったりする状況が発生した[133][142][172]。Twitterでも注目を集め[134][173]、NECビッグローブによる統計によれば、再突入を捉えた動画や画像が公開された頃を中心に、10分間辺り最大で27,000件を上回る発言がはやぶさの話題に費やされた[143][174]。これは翌日の同時間帯に放送された2010 FIFAワールドカップ日本対カメルーン戦でゴールを決めた本田圭佑に対する、10分間辺り最大16,000件の発言[143][174] を圧倒的に上回っている。
また「はやぶさ」が地球に帰還した翌日には、オンライン署名サイトで「はやぶさ2予算増額の嘆願署名」が作成されるなど、関係者以外からも注目が集まっている[175]。
はやぶさを扱ったグッズや作品に対する反響
[編集]はやぶさに対する反響の一環として、プラモデルや書籍、果ては日本酒といったグッズも、無人探査機を扱った商品としては例外的な売れ行きを示した[176]。例えば青島文化教材社から発売されたプラモデルは、同社における通常のヒット商品と比べて約4 - 5倍もの受注があり、初回製造分が数日で売り切れるほどの反響があったという[177][178]。 2009年4月1日には、はやぶさの困難な旅程を叙情的[179] に描いたプラネタリウム番組『HAYABUSA -BACK TO THE EARTH-』が公開され、プラネタリウム番組としては異例の人気があったという[8]。 『HAYABUSA -BACK TO THE EARTH-』はDVDおよびBDでも発売され、好評を博したものの、終盤の映像はあくまで予想に基づく制作だったため、はやぶさの地球帰還の後に完全版を求める声が相次ぎ、終盤の映像を事実に基づいたCG映像と差し替えた『HAYABUSA -BACK TO THE EARTH- 帰還バージョン』が制作され、各地で上映中であったプラネタリウムでも随時帰還バージョンへと差し替えられた。
はやぶさを題材にした作品
[編集]関連する作品
[編集]はやぶさ帰還後にはJAXAに8社から映画化のオファーがあり[180][注釈 81]、2011年秋期から2012年春期にかけてはやぶさを主題とした映画3作が相次いで公開された。日本国内で同じ題材の映画が3作品重なって競作されることは非常に稀なことである[182]。このうち20世紀フォックスの映画『はやぶさ/HAYABUSA』は、史上初の宇宙試写会という触れ込みで、国際宇宙ステーションに滞在中の宇宙飛行士を対象にした試写会が企画され[183]、2011年7月27日に実施された[184]。映画の他には、映画の原作となった著作や、探査機を萌え擬人化した漫画作品などが出版されている。
映画
[編集]
- 『はやぶさ HAYABUSA BACK TO THE EARTH』:監督は上坂浩光。2009年4月1日に公開された。元々は日本全国のプラネタリウムでのみ上映された作品だったが、角川フィルムインク配給で2011年5月14日より日本全国の映画館で公開。全編CG製作。
- 『劇場版HAYABUSA2〜REBORN』:シリーズ続編。初代はやぶさ視点(ナレーション)で、後継はやぶさ2帰還までを描く[186]。
- 『はやぶさ/HAYABUSA』:20世紀フォックス製作・配給で2011年10月1日に日本公開された。2012年3月にアメリカ合衆国主要10都市で公開予定[187]。監督は堤幸彦、主演は竹内結子。
- 『はやぶさ 遥かなる帰還』:東映製作で2012年2月11日に日本公開。監督は瀧本智行、主演は渡辺謙。
- 『おかえり、はやぶさ』:松竹配給・製作で2012年3月10日に日本公開された3D実写映画。監督は本木克英、脚本は金子ありさ。主演は藤原竜也。音楽は冨田勲。
アニメ
[編集]- 『はやぶさの奇跡』:『フジテレビ夢スペシャル「タモリ×SMAP僕らは未来を信じよう!〜宇宙への挑戦と奇跡の物語〜」』内作品。アニメと実際の映像が混在している。2011年4月3日放送。監修・キャラクターデザインは松本零士。ナレーションは草彅剛。制作は東映アニメーション。
小説
[編集]- 『小惑星探査機 はやぶさの大冒険』:『はやぶさ 遥かなる帰還』の原作となった山根一眞による著作。2010年7月29日、マガジンハウス出版(ISBN 978-4838721030)。
- 『「はやぶさ」がとどけたタイムカプセル~7年、60億キロの旅~』は、JAXA名誉教授的川泰宣氏監修による子供向けノンフィクション作品。著者は山下美樹。2011年10月、文溪堂より刊行。(ISNB978-4-89423-726-1)。
漫画
[編集]- 『探査機はやぶささん』:オレンジゼリー著、細田聡史(JAXA)監修の探査機を萌え擬人化した漫画作品。2012年2月10日、エンターブレイン出版(ISBN 978-4047277656)。
- 『小惑星に挑む』 :あさりよしとお著、探査機のメカニズムと地球と小惑星間での往復道程を解説した漫画作品。2013年9月4日、白泉社出版(ISBN 978-4-592-71058-5)
演劇
[編集]- 『はやぶさものがたり〜宙(そら)翔けた軌跡〜』:作・演出は梅本雅之(2015年9月現在、大阪府立桃谷高等学校演劇部顧問)。上坂浩光監督『はやぶさ HAYABUSA BACK TO THE EARTH』を原作に、探査機やエンジンなどを擬人化した時代劇仕立ての演劇作品。2012年8月、当時梅本が顧問をしていた大阪府立鳳高等学校演劇部により初演。以後、大阪府下演劇部合同劇団はやぶさ座により上演が続けられている。大阪のほか、2014年には東京都調布市で、2015年には東京都調布市と神奈川県相模原市で上演された[188]。
音楽
[編集]- 『Lullaby of Muses』:甲斐恵美子作曲、演奏、2002年11月1日、Lyra Records(レーベルのプロデューサーは尾久土正己)よりリリース[189]。2001年、MUSES-C理学チームの矢野創から尾久土にMUSES-Cのテーマ曲の依頼があり制作が始まった。打ち上げ前から地球帰還までを11曲の組曲で表現した。2005年1月には、このアルバムを使ったプラネタリウム番組『ボクノチイサナオホシサマ』があすたむらんど徳島で公開された[190]。2007年4月には、この音源を元にした音楽ビデオ「祈り」をJAXAが発表[191]。2008年5月14日、ドイツ・ハンブルグで開催されたWorld Media Festivalで銀賞を受賞した[192]。2010年6月13日の和歌山大学チームによる中継映像にはメンバーのスマホから流れていた本アルバムの地球帰還の曲『Back to my arms』がBGM的に入ってしまっている[193]。
- 『はやぶさ ~The Great Journey: 奇跡の帰還~』- T-SQUAREが2011年(帰還翌年)に発売したアルバム「Nine Stories」の2曲めに収録されている。探査機はやぶさをイメージした曲。
フィクションへの影響
[編集]- 2007年に発行された野尻抱介のライトノベル『ロケットガール』4巻に小惑星探査機「はちどり」が登場した。再突入カプセルの蓋を閉められないまま帰還して来る探査機を回収するミッションに主人公達が挑む。当初は「はやぶさ」の名をそのまま用いる予定だったが、はやぶさがバッテリー再充電とカプセル蓋閉め運用に成功したため、「小説が現実に追い付かない」とモデルにするに留めた。なお前述のように、著者である野尻ははやぶさの大気圏再突入の際、ニコニコ生放送現地中継に参加している[194]。
- 2009年に公開されたアニメ映画『サマーウォーズ』に小惑星探査機「あらわし」が登場。はやぶさをモデルにしている(角川文庫版の解説より)とされるが、自力で地球周回軌道に乗ってから再突入するというはやぶさでは不可能な描写がある他、試料カプセルがミサイルの様な形状になっている。「はちどり」「あらわし」とも、探査対象の小惑星は「マトガワ」である。
- はやぶさ帰還の1週間前に発売された週刊少年ジャンプの『こちら葛飾区亀有公園前派出所』にははやぶさをモデルとした「青羽」という無人探査機の物語が掲載された(単行本第175巻収録)。因みに、この話で探査機は地球へ帰還するが、最終的にカプセルは大気圏で溶けてしまっている。
- はやぶさプロジェクトが大きな話題となっていた2010年秋に放送されたTBSのテレビドラマ『SPEC〜警視庁公安部公安第五課 未詳事件特別対策係事件簿〜』の最終回に登場した。劇中で主人公の1人である当麻紗綾の亡き父が、生前「はやぶさ」の開発に携わっていたというエピソードが語られた。演出の堤幸彦は上述の映画『はやぶさ/HAYABUSA』の監督でもある。
- 2011 - 2012年放送の特撮テレビドラマ『仮面ライダーフォーゼ』では、主人公の幼馴染で宇宙オタク少女の城島ユウキが、「はやぶさ」(実名のまま)のかぶり物を着て自作の「がんばれ、はやぶさくん」という歌を歌って踊ったり、「はやぶさ」をモデルとしたパペット人形を持ち歩いたりなど、「はやぶさ」関連のものが度々登場する(ただし、これ以外にも宇宙関連のものが数多く登場し、「はやぶさ」はそのうちの1つである)。
- コナミデジタルエンタテインメントの音楽ゲーム『pop'n music』に登場するキャラクターであるパラボー(PARABO)は、「はやぶさ」がモチーフ。また、誕生日である6月13日も帰還日に由来する。
「はやぶさ」に由来する命名
[編集]- 国際天文学連合は、2017年9月に冥王星のスプートニク平原の近くの地名をNASAの提案を受けて「Hayabusa Terra (ハヤブサ大陸)」と命名した[195]。
- 鹿児島県立楠隼中学校・高等学校 - 内之浦宇宙空間観測所が所在する鹿児島県肝付町にある学校。なお、「楠」は鹿児島県の県木、かつ肝付町の町木であるクスノキに由来する。
- はやぶさ (小惑星)
書籍
[編集]関連書籍
[編集]- 『恐るべき旅路 火星探査機「のぞみ」のたどった12年』(著者:松浦晋也)(2005年5月30日、朝日ソノラマ)ISBN 9784257037002
- 『恐るべき旅路 火星探査機「のぞみ」のたどった12年 新版』(著者:松浦晋也)(2007年10月1日、朝日新聞出版)。ISBN 978-4-02-213809-5
- 『恐るべき旅路 火星探査機「のぞみ」のたどった12年』(著者:松浦晋也)(2014年1月1日、朝日新聞出版)ISBN 9784835450261
- 『はやぶさ 不死身の探査機と宇宙研の物語』(著者:吉田武)(2006年11月29日、幻冬舎 幻冬舎新書)ISBN 4-344-98015-8
- 『現代萌衛星図鑑』(著者:しきしまふげん、漫画:へかとん、監修:松浦晋也)(2009年7月7日、三才ブックス)ISBN 978-4-86199-206-3
- 『小惑星探査機はやぶさの大冒険』(著者:山根一眞)(2010年7月29日、マガジンハウス)ISBN 978-4-8387-2103-0
- 『小惑星探査機はやぶさの大冒険』(著者:山根一眞)(2014年10月1日、講談社+α文庫)ISBN 9784062815703
- 『Newton別冊 探査機はやぶさ7年の全軌跡 世界初の快挙を成し遂げた研究者たちのドラマ』(2010年8月10日、ニュートンプレス)ISBN 978-4-315-51885-6
- 『小惑星探査機「はやぶさ」の奇跡 挑戦と復活の2592日』(著者:的川泰宣)(2010年9月20日、PHP研究所)ISBN 978-4-569-79234-7
- 『小惑星探査機「はやぶさ」宇宙の旅』(著者:佐藤真澄、監修:渡辺勝巳)(2010年10月1日、汐文社)ISBN 9784811387321
- 『小惑星探査機はやぶさ物語』(著者:的川泰宣)(2010年10月8日、日本放送出版協会 生活人新書)ISBN 9784140883303
- 『はやぶさ、そうまでして君は 生みの親がはじめて明かすプロジェクト秘話』(著者:川口淳一郎)(2010年12月10日、宝島社)ISBN 4-796-67891-3
- 『カラー版 小惑星探査機はやぶさ 「玉手箱」は開かれた』(著者:川口淳一郎)(2010年12月20日、中央公論新社 中公新書)ISBN 978-4121020895
- 『はやぶさLOVE講座』(編者:COMICリュウ編集部)(2010年12月20日、徳間書店 Roman album)ISBN 978-4-19-720321-5
- 『帰ってきた「はやぶさ」 小惑星探査機7年60億キロの旅』(作:今泉耕介、画:ハイロン)(2010年12月24日、ハート出版)ISBN 9784892956775
- 『小惑星探査機「はやぶさ」の超技術 プロジェクト立ち上げから帰還までの全記録』(監修:川口淳一郎、編集:「はやぶさ」プロジェクトチーム)(2011年3月20日、講談社 ブルーバックス)ISBN 978-4-06-257722-9
- 『飛べ!「はやぶさ」 小惑星探査機60億キロ奇跡の大冒険』(文:松浦晋也)(2011年4月21日、学研教育出版)ISBN 9784052033803
- 『小惑星探査機はやぶさくんの冒険』(原作:小野瀬直美 奥平恭子、シナリオ:黒沢翔、漫画:柊ゆたか)(2011年6月24日、集英社 学習漫画サイエンス)ISBN 9784082880927
- 『はやぶさものがたり』(文:今井なぎさ、絵:すがのやすのり)(2011年7月12日、コスモピア)ISBN 9784864540025
- 『「はやぶさ」がとどけたタイムカプセル 7年、60億キロの旅』(文:山下美樹、監修:的川泰宣)(2011年9月28日、文溪堂)ISBN 9784894237261
- 『はやぶさ/HAYABUSA』(著者:鷹見一幸、絵:かしわ)(2011年9月30日、角川書店)ISBN 9784046311887
- 『人工衛星図鑑 はやぶさへの道のり』(著者:武部俊一)(2011年11月4日、朝日新聞出版 朝日文庫)ISBN 9784022617125
- 『はやぶさパワースポット50』(監修:川口淳一郎、編集:はやぶさPS編集部)(2012年1月16日、三和書籍)ISBN 9784862511232
- 『はやぶさ力 川口淳一郎とチームはやぶさ39の新証言』(監修:川口淳一郎)(2012年1月26日、学研パブリッシング)ISBN 9784054052062
- 『はやぶさ 世界初を実現した日本の力 描かれざる想いと真実』(著者:川口淳一郎)(2012年2月14日、日本実業出版社)ISBN 9784534049223
- 『おじいさんのはやぶさ』(監修:川口淳一郎、作・絵:間瀬なおかた)(2012年7月17日、ベストセラーズ)ISBN 9784584134429
- 『小惑星探査機「はやぶさ」大図鑑』(監修:川口淳一郎、CGイラストレーション:池下章裕、解説:松浦晋也)(2012年8月2日、偕成社)ISBN 9784035337102
- 『探査機「はやぶさ」川口淳一郎の視点』(著者:川口淳一郎 松田修一)(2012年10月1日、東奥日報社)ISBN 9784885611285
雑誌
[編集]- 『ラジオライフ』(2010年8月号16-18頁・同2010年9月号16-21頁、三才ブックス)- 野尻抱介によるニコニコ生放送とカプセルのビーコン受信ルポ
論文・記事
[編集]- 國中均、西山和孝、清水幸夫、都木恭一郎、川口淳一郎、上杉邦憲「小惑星探査機「はやぶさ」搭載マイクロ波放電式イオンエンジンの初期運用」『日本航空宇宙学会論文集』第52巻第602号、日本航空宇宙学会、2004年3月5日、129 - 134頁、doi:10.2322/jjsass.52.129、ISSN 1344-6460、NAID 10012680638。
- 國中均「「はやぶさ」小惑星探査機に搭載されたマイクロ波放電式イオンエンジン」『プラズマ・核融合学会誌』第82巻第5号、プラズマ・核融合学会、2006年5月25日、300 - 305頁、ISSN 0918-7928、NAID 110006282066。
- 山田哲哉、安部隆士「「はやぶさ」カプセルの地球大気再突入時におけるプラズマ現象とその周辺」(PDF)『プラズマ・核融合学会誌』第82巻第6号、プラズマ・核融合学会、2006年6月25日、368 - 374頁、NAID 110006282076。
- 藤村彰夫、安部正真「はやぶさサンプルコンテナのキュレーション」(PDF)『日本惑星科学会誌』第19巻第3号、日本惑星科学会、2010年9月25日、211 - 213頁、ISSN 0918-273X、NAID 110007730784。
- 川口淳一郎「宇宙工学 「はやぶさ」60億キロの旅」『日経サイエンス』第40巻第9号、日経サイエンス、2010年9月、35頁、ISSN 0917-009X、NAID 40017235631。
- 矢田達、安部正真、岡田達明、中村智樹、野口高明、岡崎隆司、石橋之宏、白井慶 ほか「探査機「はやぶさ」が持ち帰った小惑星イトカワ粒子の初期記載について」(PDF)『日本惑星科学会誌』第22巻第2号、日本惑星科学会、2013年6月25日、68-77頁、ISSN 0918-273X、NAID 110009612580。
DVD
[編集]- 『NHKDVD 小惑星探査機“はやぶさ"の軌跡』(2010年12月22日、日本コロムビア)JAN 4988001423300
テレビ番組
[編集]- 追跡!AtoZ 「“はやぶさ”快挙はなぜ実現したか」(2010年8月28日、NHK)[196]
- 日経スペシャル カンブリア宮殿 挑み続けた2592日...感動のドラマの裏側 「あきらめなければ未来は拓ける!」(2011年3月24日、テレビ東京)[197]
- 新プロジェクトX〜挑戦者たち〜 小惑星探査機はやぶさ 奇跡の地球帰還(2024年9月21日、NHK総合)[198]
脚注
[編集]注釈
[編集]- ^ はやぶさ探査情報を基にした、小惑星イトカワ解析結果とその論文がアメリカ科学論文誌『サイエンス』2006年6月2日号に特集として掲載(日本の宇宙研究・開発では初)された。アメリカの International Space Development Conference (ISDC 2006) において Space Pioneer Award として米国宇宙協会より表彰を受けている[1][2]。
- ^ NASAの小型探査ロボットを運んで行って小惑星表面を移動しながら探査を行う計画も存在していた(MUSES-CNの項を参照)。
- ^ トラブルとは、姿勢制御装置故障や化学エンジン燃料漏れによる全損、姿勢乱れ、電池切れ、通信途絶、イオンエンジン停止など数々のアクシデントを指す。
- ^ 当初の計画通りなら、再突入約10時間前に月軌道程度の距離で試料カプセルを分離した後[7]、はやぶさ本体は突入軌道より離脱して別の目標へ向かうことも可能であった。しかし。化学スラスタが使用出来なくなって急激な軌道変更が不可能となり、また精密な姿勢制御に困難を伴うようになったことで、カプセルが市街地に落下する心配も生じた。このため、地球になるべく近付いてからカプセルを分離する計画へ変更され、結果として当初のような延長ミッションは断念された。その代わり、2009年には本体大気圏再突入の際のデータを、地球に衝突する小惑星軌道予測のためのシステム開発に役立てるという新たなミッションが加えられた。
- ^ 探査機との通信は臼田宇宙空間観測所の64 mパラボラアンテナを用いて行われたが、2009年11月より64 mアンテナが改修工事に入ったため、工事終了までは内之浦の34 mアンテナが使われた。
- ^ 「はやぶさ」は温度管理を内蔵ヒーターで行っていた。内蔵・外装の機器類は太陽光線などを遮蔽することで基本的には低温環境にしておき、電源系からの電力を使ったヒーターで適温まで暖める方式が採用されていた。
- ^ 他の大型宇宙機などでは冗長性を持たせるために複数台の制御装置を搭載することが珍しくないが、はやぶさでは軽量化が優先されてITCUは1台だけ搭載された。ただ、内部的には3つのCPUの出力をASICによる多数決回路で不良判定することで、ある程度の信頼性を確保している。
- ^ 制御装置は汎用自律化機能を備え、最大32ある条件テーブルに従って外部からの指令を待たずに自律的に動作を行うことが可能になっている。また常時IESを監視していて、アキュムレータ圧力、プラズマ点火状態、直流電源の電圧 / 電流値、グリッドの短絡などを見張っていて、動作不良と判断すると安全なモードへ移行するようになっていた。
- ^ HGAは、火星探査機「のぞみ」のものと同等品であるが、地球公転軌道より内側にあたるイトカワ公転軌道近日点での熱環境を考慮して白色に塗装されている点が異なる。
- ^ イトカワとのランデブーでは、はやぶさから見て地球と太陽がほぼ20度程度の視野範囲内に位置していたため、地球方向へ高い精度でHGAを向けた姿勢でz軸での回転運動を行っても、太陽電池パネルはおおむね正しく太陽へ向けることが可能であった。
- ^ 通信途絶からの回復後には32 bpsで通信を行った。
- ^ MGAを用いた通信が不可能で、LGAを用いざるを得ない状況というのは、機体が安定せずにランダム方向にスピンしているか、良くても太陽方向に太陽電池パネル面を向けてZ軸周りにスピンしている「セーフホールドモード」にあるという場合が想定された。LGAは8 bpsという極めて低速度通信しか行えず、遠距離によって信号波にタイムラグがあり、さらに自転しているために一定周期で通信が遮蔽されるという状況でも、最低限の質問を短いコマンドで問合わせて、その回答を"YES" / "NO"で得るという「1ビット通信」機能を用意していた。燃料タンクからの漏洩によって姿勢制御を失い漂流したが、この機能によって通信を回復させた。
- ^ 一般的な人工衛星などでは太陽電池パネルは「I形」となるような一直線に配置されることが多いが、「はやぶさ」ではz軸方向での回転モーメントが最大となるように「H形」に配置されている。仮にトラブルによって姿勢制御を失った場合、宇宙機は予測不可能な向きに回転してしまうことが考えられる。そのような時、燃料タンク等の液体などが動揺することで3軸回転成分同士でエネルギーを交換し合い、長い時間が経てば、3軸の中でも最大モーメント軸にだけ回転運動が収斂されることが知られている。太陽電池パネルを「H形」になるよう配置することで、z軸方向にだけ回転するようになり、太陽を公転する「はやぶさ」はやがて太陽方向にセルを向け続けることで発電量も確保し、再起動可能となると考えられていた。そして、実際に長期間通信途絶後に再度制御を取戻すことが出来た。また「H形」であれば小惑星「イトカワ」へのタッチダウン時に接触する可能性を少なく出来ると考えられた。
- ^ 燃料漏洩によって漂流した後、4セルは過放電で使用不能となっていたが、生き残っていた7セルはある程度充電さえ行われていた。本来は過充電防止のためのバイパス回路が、生き残った7セルに対して微弱ながら発電していた太陽電池からの電力を供給し充電していたので、偶然にも7セルだけは過放電による機能喪失を免れた。
- ^ リアクションホイールの2基が故障した後は、約+1000 - +5000 rpmであった回転数を+300 - +2000 rpmに制限したため、各運動量の保存量が減少しアンローディング回数が増えてRCSの推進剤を予定より早く使い切ったが、帰路ではμ10イオンエンジンのジンバルを傾けることで推力を機体重心からずらし、この噴射によってz軸周りのトルクを発生させてリアクションホイールのアンローディングを行った。
- ^ 炭素繊維強化炭素複合材料とは、炭素繊維強化プラスチックを熱処理し、母材のプラスチックを炭化させた複合材料のこと。これはモリブデンのような金属板と異なり運用時の高温で膨張することがなく、穴位置が変化する心配がないが、運転によって内部繊維が「ウィスカー」と呼ばれるひげとなって表面へ出て来ると、短絡による放電が発生する。直流電源は短絡によっても数秒間は耐えられる設計となっていた。スクリーン - アクセル間の短絡時には、直流電源コンデンサバンクからの大電流によってウィスカーが焼き切られることが期待される。アクセル - ディセル間の短絡は300 Vと電圧が低いため、コンデンサバンクによっても焼き切れるかそれほど期待出来ないが、ディセル電圧がアクセルと同電位になっても加速性能そのものには影響しない。また、リレーボックス開閉操作は、通常時は直流電源を停止してから行うが、ウィスカーを焼き切るために電源を入れたまま接続系統を切替えることも行えるようになっていた。
- ^ 中和器にかけられた電圧は、当初は-30 Vほどの電圧であったが、劣化によって機能が落ちたため劣化が加速することを承知で制限値である-50 Vへと変更された。劣化が進んだ最終段階では制限を外したさらに高電圧でも運用された。劣化原因については不明である。
- ^ イオン生成チャンバーと中和器のキセノンガス供給系が各組ごとで共通であったので、イオン・エンジンのイオン源Bと中和器Aを「クロス運用」した場合には、本来は無用なイオン源Aと中和器Bにもガスが供給された。
- ^ 宇宙機での推進剤タンクの流量制御にはマスフロー・コントローラを使用するのが一般的であったが、「はやぶさ」ではアキュムレータを用いた。マスフロー・コントローラは故障が多く信頼性に欠けるが、冗長性のために2台搭載するのは重量過大と判断された。アキュムレータを用いたことで流量や圧力安定性や精度は低下するが、確実な動作の方を選んだ。
- ^ 仮にマスフロー・コントローラを採用していれば、制御域が10倍程度と狭いマスフロー・コントローラでは、姿勢制御装置が機能を失った時に、高圧ガスをそのまま供給してイオン・エンジンから噴射することは出来なかった可能性が高い。
- ^ バルブ類は、高圧系は70気圧にも耐えられる高価なものを、低圧系はより低い耐圧設計の低コストなものが採用されるのが一般的であったが、「はやぶさ」では低圧系も70気圧に耐え得るものを採用していた。これは高圧側バルブ故障や操作ミスなどでも低圧側が耐えられるように配慮したものであったが、このことが、リアクション・ホイールや噴射式の姿勢制御装置が機能を失った際に、キセノンの高圧ガスをそのままイオン・エンジンから噴射することで姿勢を保つという緊急手段を可能とした。
- ^ 中和器から電子を放出する適正な電流値は、イオン生成後にグリッドから放出されるキセノン・イオンの正電荷量を打ち消すだけの電流値が倍率「1.0」として標準となっていたが、2台の中和器で3台のイオン源を中和する倍率「1.5」や、1台の中和器で2台のイオン源を中和する倍率「2.0」といった運用モードが用意されていた。実際には、中和器劣化が早く、このような倍率を用いることはなかった。
- ^ リレーボックスが行える3台の直流電源からの出力切替は「IPPU 1:スラスタA / B, IPPU 2:スラスタB / C, IPPU 3:スラスタC / D」であった。
- ^ 元々±y面方向にはあまり軌道制御が必要ないことや重量削減のためもあるが、±y面方向には太陽電池パネルがあり、RCSの噴射によって裏面放熱板が汚れる恐れや推力方向がズレることもあって、±y面にはRCSを付けなかった。どうしても±y軸方向に動かす必要がある場合には、まずz軸回りへ90度回転させてからx軸方向のスラスタで対応した。
- ^ 酸化剤四酸化二窒素は-30 ℃以下にならないと凍らないが、燃料であるヒドラジンは2 ℃以下で凍るため、この特性によって構体内に凍結した燃料がいつまでも残ってしまい、時折、機体に予期せぬ運動などを起こして悪影響を与えたと考えられている。
- ^ リアクションホイールは、2005年7月30日にz軸、同年10月2日にはy軸が故障した。
- ^ 「ニア・シューメーカー」や「ディープインパクト」といった宇宙機でも採用実績がある、米イサコ(Ithaco)社(現・グッドリッチ社)製"Type-A"リアクションホイールが使用されたが、精密な回転部品を含むこの製品は液体燃料ロケットによる加速度には耐える設計であったが、「はやぶさ」を打上げる固体燃料ロケット「M-Vロケット」の発射時の振動や衝撃に耐え得るように元々出来ていなかった。イサコ社では固体ロケットによる大きな振動にも耐えられるように可能な限りの改良を行ったが、この改造に起因する障害が(少なくとも地上での追試験でも、磁石がステータに当たり欠けて飛散するのを防ぐためのメタルテープが冷却・過熱を繰り返すと剥がれて回転障害となるという同様の問題が再現されたので)発生して、続々と機能を失ったのであると考えられている。
- ^ NASAの探査ローバー "MUSES-CN" も搭載する計画が進められていたが中止となり、打ち上げ予定時期直前まで同ローバーの搭載予定空間と本体左太陽電池パドル下に開口部があった。
- ^ カメラを含むデジタル機器類仕様を見れば、2011年現在の民生用途普及品レベルよりも劣るものが多いが、2003年当時は相応に高性能であり、また宇宙機部品全般に言えるのは宇宙での使用実績がない最先端技術よりも実証済の枯れた技術が採用される傾向がある。
- ^ 小型軽量高精度であるが、デジタル処理回路に宇宙線が当たることで演算エラーとなり、平均的には数か月に1度程度エラーとなってリセットしなければならない。小惑星への再突入前日に、前々日からバイアス調整済であった1台がエラーとなり、リセット(再起動)したが、ぎりぎりで再調整することとなった。
- ^ ONC-W2ははやぶさ側方を広角撮影するために設けられた。はやぶさはイトカワに近付くと、その重力に引かれることや太陽と地球にパドルとアンテナを向けながらイトカワを観察する必要から、イトカワと太陽 , 地球を結ぶ線上の「ゲートポジション」(20 km)や「ホームポジション」(7 km)と呼ばれる位置に留まることが多くなる。但し、そのような位置からではイトカワの表面は太陽に照らされた明るい画像しか得られず、科学探査としては陰影のある側方からの「ターミネーター観測」と呼ばれる撮影が望まれた。太陽方向へパドルを向けることはほぼ必須であったので、この要求に応えて側面方向にもカメラを備えることとなった。結局、主にRW故障によってターミネーター観測はキャンセルされ、最後に地球の映像を撮影して役目を終えた。
- ^ "AMICA" とも呼ばれる。
- ^ 何らかのノイズを拾って受光センサが異常検出しないように、FBSでは複数回異常を検出した場合に限り、障害物があると警告を報告するようになっていた。
- ^ 1回目の降下では、接地寸前にFBSが異物を検出したので規定の自律判断に従い、降下を中止すると同時に底部RCS4基の噴射によって機体は上昇を始めたはずであった。その後の状況は明確ではないが、安全圏に浮かびながらその後の指令が来るのを待っているはずであったが、上昇用スラスタ推力に不均一があったのか、一度は上昇した後、十分離れる前に上昇を終えると、やがてはイトカワへ落下して数回バウンドしてから30分間程度、小惑星表面に不時着していたと分析された。4基のRCSが均等に推力を発生しないと機体は弧を描いて進み、最悪では小惑星へ向かって突進してしまうため、自律制御プログラムは不均一な推力状況ではRCS噴射を停止するように定められていた。RCSは極寒の真空環境で動作する多くのバルブ類や温度や圧力に本来は敏感な化学的反応に頼っているため、精密な動作制御には余り向いていない。FBSは2回目の接地からは正常に動作した。
- ^ 実際のNIRSを用いた観測では、7 km離れたホームポジションより12 m四方の領域を測定し、イトカワ表面の6 - 7割をカバーした。
- ^ AMICAフィルターは、地上から小惑星を観察する際に用いられる分光域"ECAS"に準拠しているため、多くの小惑星データと比較することが可能である。
- ^ リアクションホイールが使用出来ず偏光フィルターを用いた測定は行えなかった。
- ^ ターゲットマーカーは東京の町工場によって作られた。
- ^ アブレータは従来より用いられている技術であるが独自の工夫も加えられており、例えば、CFRPの一部が高温状態で流動化し、やがて気化する過程で、ガスが炭化層を持ち上げ剥がすような作用を防ぐために、スリット入り積層「ラティス・アブレータ」や斜め積層などの工夫が行われた。
- ^ 地球周回軌道より再突入するスペースシャトルの約30倍(淀み点総加熱率)もの空力加熱によってカプセル周囲の気流は1万 ℃に達するが、アブレータより揮発したガスが熱を遮り、ヒートシールド表面は3,000度、カプセル内は50度程度までに抑えられる[39]。
- ^ 実際は大気圏突入後5分経過した22時56分に高度5 km付近でヒートシールドが分離された。パラシュートが開いて4秒後にビーコン発信が始まった。
- ^ イトカワへの降下誘導はLIDARやLRF機能を用いて行う予定であったが、RW機能喪失によってレーザー測距機が使用出来なくなった。また、降下誘導の代替案であった「光学航法」も、高度な画像処理を行い自律的に航法判断させるには搭載コンピュータなどの処理能力が不足していて不可能だった。そこで急遽、考案されたのが「地形航法」である。
- ^ M-Vロケットは運搬する宇宙機重量や軌道に応じて、細部をその都度、設計段階より最適に造り直すため、標準的なロケットを用いるのに比べると、物理的な効率は良いが経済的には非常に高コストとなる。
- ^ 地上より宇宙へ運ばれた直後は、空気や水分のような周辺環境からの微細な異物が機体内外表面に吸着しているため、それらが徐々に結合が外れて真空中に充分に拡散し切るまでは、日数単位で数えられるある程度の期間、極めて希薄なガスが機体を取巻いている。このため、打ち上げ直後の動作確認は低電圧を扱う機器より行われた。
- ^ 最初に試験されたスラスタAは、予想通り規定の出力を得られず、6 - 7割の出力であった。スラスタAは地上試験でマイクロ波を送るケーブルを焼損していたが、発射スケジュールに合わせるためにケーブル特性の調整を行わずに搭載されたものであった。スラスタAは予備として通常の航行には用いないことが早くから決まった。
- ^ IES動作試験は、はやぶさの主な目的の1つであり、出力をいかに安定させるかという知見を得ることが当初から求められていたのであって、この段階では、航行のために出力が自由に操作出来ないことは当初から予定されていた。3基の同時運用まで可能に造られていたが、1基でも100 %の推力が得られればミッションを行うのに充分なだけの余裕があった。この動作試験の間は、毎日6 - 8時間ほどの通信可能な間に、はやぶさへIES試験を行うよう指令を与えておいて、翌日に結果を得る繰返しであった。運転条件を変えながら最適な値を求めて行ったが、日によっては異常を検知して自律的に推進を停止していることもあり、いつまでも推進力を加えない日が続くのは予定の加速を得られない恐れが高まって来た。
- ^ 太陽フレアそのものは10月から発生していたが、その最大の波が11月4日に、はやぶさの位置に到達した。
- ^ 世界初という点では、北緯30度から見える地球の映像も世界で初めてであった。EDVEGA途中の29万5,000メートル上空から撮影したものであったが、これまでこの位置を通る地球を撮影可能な衛星は存在しなかった。
- ^ x・y軸リアクションホイール故障原因は、恐らくアルミ箔であるメタルライナーが内部で剥がれて回転を阻害したと考えられた。
- ^ リアクションホイールが2基となっても、当初より2基での運用も想定されていたため支障は起きなかった。
- ^ この時すでに、本来の降下誘導で威力を発揮する予定であったレーザー測距機 IDAR活用は余り期待されていなかった。リアクションホイールの実質的な喪失によってLIDARのビーム方向を精度良く維持出来ないと判断されていた。LIDAR誘導の代替案として、光学カメラによる画像データによって自律誘導させることが試され、この日は失敗した。
- ^ 3回ほどバウンドしたという情報もある。
- ^ 地球帰還後の2010年11月29日に弾丸発射失敗原因がプログラムミスであったことが正式に公表された。個々のプログラムにバグはなかったが、プログラムから別のプログラムにデータを受渡す際の真偽の解釈が逆という、パラメータ設定の人為的なミスがあり、システム全体としては問題があった[48][49]。
- ^ 結局この際の接地で僅かな試料が得られた。
- ^ 地球の管制室には、弾丸発射を含めた着陸シーケンスが全て正常に動作したことを示す「WCT」の表示があった。
- ^ z軸周りのスピン軸が太陽方向に対して傾くと太陽電池パネルの発電能力が低下する。
- ^ イオンエンジンのキセノンイオンによる推力が地上での1円玉1個の重さに相当するミリ・ニュートン単位であるのに対して、中和器から直接ガスを噴射するだけでは、マイクロ・ニュートン単位での1000分の1程の推力しか発生しないが、それでも必要なトルクが得られた。
- ^ 弾丸発射は、姿勢軌道制御コンピュータ(AOCP)が弾丸発射に関する指示を担当し、データ処理コンピュータ(DHC)は安全確保のために発射機構をロックするよう分担してプログラムされていた。本来ならAOCPが発射指示を出し、DHCは弾丸発射後に再度ロックを掛けるはずであったが、地球側でプログラムを確認するとAOCPが発射指示後にDHCが発射前にロックを掛けてしまうことが分かった。弾丸は発射されなかったことがほぼ確実であった。
- ^ 但し、はやぶさ電源系統がリセットされていることや、着陸時にサンプラーホーン温度が上昇していることなどから、弾丸が発射された可能性も残されているとした。
- ^ この時点では、z軸を地球にほぼ向けてz軸を中心に毎秒1度で自転していた。
- ^ はやぶさは受動的に安定するように設計されているので、2006年12月までに電力と通信が復旧出来る可能性は60 %、2007年春ならば7 0%と計算された。2007年春までイオンエンジンが使用可能であれば、地球帰還の可能性は高いとされた
- ^ この時、セーフホールドモードによるz軸周りに自転した機体は、z軸方向にして70度ほど傾き、毎秒7度で以前とは逆方向に回転していた。
- ^ 太陽電池パネルを常に太陽方向へ向けなければならないが、はやぶさも太陽を1年強ほどで公転しているためにz軸もそれに同期して向きを変えなければならない。RCSの推進剤が失われたため、1基のリアクション・ホイールと中和器からのキセノンガス噴射しか姿勢制御の手段を持たないが、ホイールはz軸方向でありキセノンガスは本来の推進力としても必要であった。概算によって軌道制御と姿勢制御を両方行うにはガスが不足する可能性があった。キセノンの消費量を減らすために太陽光の放射圧を用いる方法は、NECのエンジニア、白川健一が考案した。はやぶさを太陽に対して少し傾けることで、常にいびつな力を受け続け、そのわずかな力が公転に合わせてz軸の向きを変えてゆく。
- ^ これらの電池は損傷が激しく、カプセル格納作業以降は使用が期待されなかったので、無重力下での放電挙動を調べるために意図的に過放電状態にする実験が行なわれ、最終的に全数が使用不能となった。
- ^ スラスタB・Dによる2基同時運用を想定してイオンエンジンをテストしていたところ、スラスタB中和器が電圧上昇を起こして停止したため、スラスタD単独運用へ変更された。
- ^ 巡航運転時のはやぶさは、ヨー軸・ピッチ軸については、唯一生き残ったZ軸のリアクションホイールと、本来、イオンエンジンの推力軸調整用であるジンバル機構を併用して姿勢制御を行い、ロール軸については太陽光圧を利用して姿勢制御を行っていた。
- ^ スラスタCはバックアップ用とされ、以降は基本的にA - Bが使用されるようになる。夏以降の軌道計画見直しにより必要なデルタVは合計2,200 m/sと若干増加していたが、この時点で残り200 m/s余り。
- ^ この時点では、まだ地球公転軌道内側を通過する軌道にいた。地球突入速度を抑えるため、地球の自転方向と同じ向きに進入するように、地球公転軌道外側を通るような軌道まで変換作業を継続。軌道変換中に一時的にも地球へ衝突する軌道とならないように、通過軌道が地球の南極上空となるような経路が選択された。
- ^ 19時51分、はやぶさは再突入カプセルを分離した。飛行時間が3年伸びたことにより、火工品などの劣化が心配されていたが、分離機構は正常に作動した。
- ^ 地球周回軌道を飛翔する物体の場合は約7.8 km/sの速度
- ^ 惑星軌道からの高速な大気圏再突入は世界でも余り前例がなく、スターダストの回収カプセル以来4年半振り2度目の成功となる。さらに、惑星軌道からの母船再突入は世界初となった。
- ^ 今回の突入を航空機から観測することによって、宇宙機の超高速再突入時における熱保護システムの振る舞いを評価し、将来的に火星からのサンプルリターンのカプセル研究に役立てるという。[89]
- ^ 回収後のカプセルのキュレーション作業もNASAと共同で実施している[90]。
- ^ はやぶさにジェット推進研究所が開発した小型ローバーを搭載する計画やアメリカ国内へカプセルを着陸させる案もあったが、この2つは実現しなかった。
- ^ 打上げられた探査機が宇宙空間で物質を追加搭載して税関を経由せず外国に到着することは前例が無く、既存の法律では密輸行為になりかねない(前述の行為を迂闊に認めると、一度宇宙に物質をプールしておいて、宇宙空間で物質を搭載して外国に着陸すると税関を経由しないでも輸入が可能となる)。このため、ISAS側では法的手続きにおいて、新規解釈を次々とひねり出す必要に迫られた[94]。
- ^ 施設内では輸送用免震箱よりカプセルを取出し、傷が付いていないことが確認された。カプセル表面に、打上げ前の2003年3月18日という日付と、カプセル開発などに携わった20人の名前が書かれた名刺大の紙が張られているのが見付かった[95]。名前ははっきり読める状態で、大気圏突入時、紙が劣化するほどの熱が加わらずに落下したと推定された[95]。
- ^ この段階では、直径1mm以上の目立った粒子の存在は確認されなかった[96]。
- ^ 当初は「イトカワで採取した物質の表面から発生した可能性」「地球帰還後、大気が混入した可能性」「はやぶさ内部の樹脂や金属などから発生した可能性」などが考えられた[97][98]。
- ^ 他のミッション(写真)はロバート・ゴダードのロケット打ち上げ実験(同)、ボストーク(ユーリイ・ガガーリン)、アポロ(月の足跡・月面に立つ宇宙飛行士)、ヴォイジャー(土星の輪)、国際宇宙ステーション(同)、マーズ・エクスプロレーション・ローバー(同)
- ^ 当初から小惑星探査を最終目標として設計された探査機という意味では、1994年に月探査を兼ねた小惑星探査機クレメンタインが先に打上げられている。但し、こちらは小惑星へ向かう途中で故障しており、月探査のみに終わっている。
- ^ 『日刊サイゾー』によれば、東映・東宝・松竹・角川の日本国界4大映画配給会社と、独立系、洋画配給会社など[181]。
出典
[編集]- ^ 川口淳一郎 (2006年5月31日). “「はやぶさ」プロジェクトが、Space Pioneer Award を受賞”. ISAS/JAXA. 2014年1月13日閲覧。
- ^ “Space Pioneer Award を受賞”. sorae.jp. (2006年6月2日). オリジナルの2014年2月2日時点におけるアーカイブ。 2014年1月13日閲覧。
- ^ “はやぶさ帰還、カプセル回収へ”. AFPBB News. AFP (2010年6月14日). 2020年9月17日閲覧。
- ^ a b c “「はやぶさ」大気圏突入 / カプセルも発見”. ISAS/JAXA (2010年6月14日). 2010年6月15日閲覧。
- ^ a b “「はやぶさ」カプセル回収作業完了! 熱シールドも発見!”. ISAS/JAXA (2010年6月14日). 2010年6月14日閲覧。
- ^ a b 『はやぶさカプセル内の微粒子の起源の判明について』(プレスリリース)宇宙航空研究開発機構、2010年11月16日。2010年11月16日閲覧。
- ^ a b c d e 山田哲哉 & 安部隆士 2006, p. 368.
- ^ a b “「はやぶさ」止まらぬ人気、「故郷」ツアー大盛況”. 読売新聞. (2010年7月10日). オリジナルの2010年7月12日時点におけるアーカイブ。 2010年7月21日閲覧。
- ^ a b “「はやぶさ」の近況と「はやぶさ-2」にむけて”. ISAS/JAXA. 2010年6月16日閲覧。
- ^ a b “はやぶさ、次は安心の旅に 14年に後継機打ち上げ”. 朝日新聞. (2011年5月12日). オリジナルの2011年9月2日時点におけるアーカイブ。 2011年5月12日閲覧。
- ^ a b JAXA PR (2013年1月30日). “JAXA OPEN API PROJECT”. Google+. 2013年2月2日閲覧。
- ^ a b “「はやぶさ」がAPIに アプリ開発、大学生が挑戦へ”. ITmedia ニュース. (2013年1月31日) 2013年2月2日閲覧。
- ^ a b c d e f 川口淳一郎 2010a.
- ^ “はやぶさ”. 日本の宇宙開発の歴史 [宇宙研物語]. ISAS/JAXA. 2011年1月8日閲覧。
- ^ “小惑星探査機はやぶさ”. 2020年12月6日閲覧。
- ^ “はやぶさ2「初号機とは違うのだよ」リベンジの着陸成功”. 朝日新聞. 2020年12月5日閲覧。
- ^ “初号機のプロジェクトマネージャが語る「はやぶさ2」の次”. NHK. 2020年12月5日閲覧。
- ^ 「お知らせ」(PDF)『ISASニュース』第51号、宇宙科学研究所、1985年6月、4頁、ISSN 0285-2861、2009年12月16日閲覧。
- ^ “ミッションカレンダー”. JAXA小惑星探査機「はやぶさ」物語. JAXA. 2009年12月16日閲覧。
- ^ 川口淳一郎. “小惑星探査機「はやぶさ」の研究計画について”. はやぶさ特集. ISAS/JAXA. 2003年10月9日閲覧。
- ^ 松浦晋也 2005, p. 61.
- ^ 川口淳一郎「星の王子様とデート - 小惑星ランデブ探査計画」(PDF)『ISASニュース』第118号、宇宙科学研究所、1991年1月、20 - 22頁、ISSN 0285-2861。
- ^ 的川2010, 29ページ
- ^ 上杉邦憲「彗星サンプルリターン - SOCCER計画」(PDF)『ISASニュース』第118号、宇宙科学研究所、1991年1月、18 - 20頁、ISSN 0285-2861。
- ^ “1.4 History of the Investigation, Comet Coma Sample Return Plus Interstellar Dust, Science and Technical Approach”. STARDUST: SCIENCE IN-DEPTH. JPL/NASA (1994年10月21日). 2010年8月4日閲覧。
- ^ 『小惑星「イトカワ」表面の地形名称に関する国際天文学連合(IAU)正式承認について』(プレスリリース)宇宙航空研究開発機構、2009年3月3日。2011年1月8日閲覧。
- ^ 村上陽一郎; 西澤潤一; 杉山滋郎. “糸川英夫”. 日本の科学者・技術者100人. 岩手県二戸市田中舘愛橘記念科学館. 2011年1月8日閲覧。
- ^ 糸川英夫(出演)、文藝春秋(制作著作)『私と戦闘機「隼」 太平洋戦争の陸軍戦闘機を検証する』文藝春秋、1991年。全国書誌番号:21425690。
- ^ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac ad ae af ag ah ai aj ak al am an ao ap aq ar as at au 川口淳一郎 2011.
- ^ “JAXAメールマガジン 第42号”. JAXAメールマガジン. (2006年8月1日)
- ^ 國中均 2004.
- ^ a b 小惑星探査機はやぶさ搭載用レーザ高度計:機器開発とその実運用結果報告 日本航空宇宙学会論文集 Vol.54(2006)No.634 P514-521
- ^ 山本幸生; 岡田達明; 白井慶; 加藤学 (2002年5月31日). “MUSES-C搭載用蛍光X線分光計におけるX線CCDの機上解析” (PDF). 地球惑星科学関連学会2002年合同大会予稿集. 日本地球惑星科学連合. 2012年12月19日閲覧。
- ^ 斉藤宏文、福田盛介「小型高機能科学衛星INDEXの開発」(PDF)『ISASニュース』第281号、ISAS / JAXA、2004年8月、2頁、ISSN 0285-2861、2012年12月19日閲覧。「表2 INDEXに搭載される先進衛星機器(中略)機器:SH-3プロセッサ 特徴 / 性能:60MHz三重多数決プロセッサ 適用ミッション:INDEX,はやぶさ,SELENE」
- ^ 『クローズアップ現代』2006年11月30日放送分
- ^ a b 『「はやぶさ」試料回収カプセルの再突入結果について(速報)』(プレスリリース)宇宙航空研究開発機構、2010年6月16日。2010年6月16日閲覧。
- ^ “はやぶさ帰還…小惑星の砂、期待”. 読売新聞. (2010年6月14日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月26日閲覧。
- ^ a b “Hyperseed MAC: Hayabusa SRC Entry Observing Campaign”. NASA Ames Research Center. 2010年6月17日閲覧。
- ^ a b 山田哲哉 & 安部隆士 2006.
- ^ 吉光徹雄、久保田孝「研究紹介 新しきチャレンジ 世界初の小惑星探査ローバ“MINERVA”」『ISASニュース』第267号、宇宙科学研究所、2003年6月、ISSN 0285-2861、2008年10月30日閲覧。
- ^ “ねとらぼ:「ゆっくり寝てね……」 イカロス君、分離カメラ「DCAM2君」とお別れ”. ITmedia ニュース. (2010年6月16日) 2010年6月18日閲覧。
- ^ Jet Propulsion Laboratory (2000年11月3日). “NASA Cancels Miniature Rover for Joint Japan-U.S. Asteroid Mission”. NASA. 2012年2月10日時点のオリジナルよりアーカイブ。2008年10月30日閲覧。
- ^ Peters, Stephen (1999年2月22日). “NASA's Science Rover for MUSES-C”. JPL/NASA. 2008年10月30日閲覧。
- ^ Peters, Stephen (6 1999). “研究紹介 The NASA Rover for MUSES-C”. ISASニュース (宇宙科学研究所) (219) 2009年3月23日閲覧。.
- ^ 『M-V-5号機打上げについて』(プレスリリース)宇宙科学研究所、2003年5月9日。2010年8月4日閲覧。
- ^ 國中均 2006.
- ^ 矢野創. “サンプル採取の成功を信じて”. はやぶさ、地球への旅に出発 〜最後のチャレンジを達成するために〜. JAXA. 2010年8月4日閲覧。
- ^ “「はやぶさ」にプログラムミス 後継開発に教訓反映へ”. 共同通信. (2010年11月29日) 2011年4月24日閲覧。
- ^ 「動かないコンピュータ 宇宙航空研究開発機構(JAXA)「はやぶさ」成功の舞台裏 弾丸不発の原因は人為ミス」『日経コンピュータ』第774号、日経BP社、2011年1月20日、90 - 92頁、ISSN 02854619、NAID 40017434094。
- ^ “「はやぶさ」の第1回着陸飛行の結果と今後の計画について”. ISAS/JAXA (2005年11月23日). 2005年12月17日閲覧。
- ^ “「はやぶさ」の第2回着陸飛行の結果と今後の計画について”. ISAS/JAXA (2005年11月29日). 2010年8月8日閲覧。
- ^ “「はやぶさ」の着陸成功とサンプル採取の実施について”. ISAS/JAXA (2005年12月1日). 2005年12月17日閲覧。
- ^ “「はやぶさ」探査機の状況について”. ISAS/JAXA (2005年12月7日). 2005年12月17日閲覧。
- ^ “「はやぶさ」探査機の状態について”. ISAS/JAXA (2005年12月14日). 2005年12月17日閲覧。
- ^ “「はやぶさ」試料容器のカプセル収納・蓋閉め運用が完了”. ISAS/JAXA (2007年1月30日). 2007年8月31日閲覧。
- ^ “「はやぶさ」地球帰還に向けた本格巡航運転開始!”. ISAS/JAXA (2007年4月25日). 2007年8月31日閲覧。
- ^ “小惑星探査機「はやぶさ」イオンエンジン-Cへの切り替えに成功”. ISAS/JAXA (2007年8月16日). 2009年11月21日閲覧。
- ^ “「はやぶさ」復路第1期軌道変換を完了!”. ISAS/JAXA (2007年10月29日). 2007年11月19日閲覧。
- ^ “「はやぶさ」、3回目の遠日点を無事通過”. ISAS/JAXA (2008年3月6日). 2008年6月23日閲覧。
- ^ 『小惑星探査機「はやぶさ」の現在の状況について-イオンエンジン再点火、地球帰還へ向け第2期軌道変換を開始へ-』(プレスリリース)宇宙航空研究開発機構、2009年2月4日。2010年8月4日閲覧。
- ^ “2009年8月27日”. 今週のはやぶさ君. ISAS/JAXA (2009年8月27日). 2014年2月1日時点のオリジナルよりアーカイブ。2014年1月21日閲覧。
- ^ 『小惑星探査機「はやぶさ」のイオンエンジン異常について』(プレスリリース)宇宙航空研究開発機構、2009年11月9日。2009-11-21 *閲覧。
- ^ 『小惑星探査機「はやぶさ」の帰還運用の再開について』(プレスリリース)宇宙航空研究開発機構、2009年11月19日。2009年11月19日閲覧。
- ^ “復活「はやぶさ」噴射続けば地球帰還可能に”. 読売新聞. (2010年2月27日). オリジナルの2010年3月2日時点におけるアーカイブ。 2010年2月28日閲覧。
- ^ “すばる望遠鏡で「はやぶさ」の撮影成功!”. 観測成果. 国立天文台 (2010年6月13日). 2010年8月1日閲覧。
- ^ a b c d e f 「川口淳一郎プロジェクトマネージャーが語る 「はやぶさ」誕生秘話」(PDF)『JAXA's 宇宙航空研究開発機構機関誌』第33号、宇宙航空研究開発機構、2010年8月1日、4-5頁、全国書誌番号:01013637、 オリジナルの2013年4月29日時点におけるアーカイブ、2010年7月30日閲覧。
- ^ a b 橋本樹明 (2010年6月18日). “ラスト・チャンスの地球撮像”. ISAS/JAXA. 2010年6月18日閲覧。
- ^ “はやぶさ2帰還 涙”. 杉坂建築事務所|東京都世田谷区(自然素材の注文住宅。戸建て・マンション・アパートから古民家まで各種リフォーム、リノベーション). 2024年9月12日閲覧。
- ^ “アカデミーヒルズ 記事・レポート 「はやぶさ」の川口淳一郎氏が語る、奇跡のチームビルディング”. アカデミーヒルズ. 2024年9月12日閲覧。
- ^ a b “小惑星探査機「はやぶさ」、最後に地球を撮影”. sorae.jp. (2010年6月14日). オリジナルの2010年6月16日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “「「はやぶさ」最後の地球画像」画像処理でくっきり”. ISAS/JAXA (2010年6月18日). 2010年6月18日閲覧。
- ^ a b “突入直前、地球を撮影 はやぶさ最後の1枚”. 共同通信. (2010年6月13日) 2010年6月16日閲覧。
- ^ “はやぶさ、最後にとらえた地球”. 読売新聞. (2010年6月14日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ 西川拓 (2010年6月14日). “小惑星探査機:「はやぶさ」任務完了 地球の撮影が最後の仕事に”. 毎日新聞. オリジナルの2010年6月16日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “はやぶさ:最後に撮影の地球 画像処理でくっきり”. 毎日新聞. (2010年6月18日). オリジナルの2010年6月19日時点におけるアーカイブ。 2010年6月20日閲覧。
- ^ 森治 (2010年9月3日). “「はやぶさ」の運用が残したもの”. はやぶさ、地球へ! 帰還カウントダウン. JAXA. 2010年9月12日閲覧。
- ^ a b 山田哲哉、安部隆士:カプセルの地球大気再突入時におけるプラズマ現象とその周辺 プラズマ核融合学会誌6月【82-6】/講座3 (PDF)
- ^ 東山正宜 (2010年9月22日). “はやぶさ最後の輝き、満月の倍の明るさ 国立天文台観測”. 朝日新聞. オリジナルの2010年9月27日時点におけるアーカイブ。 2010年9月22日閲覧。
- ^ “「はやぶさ」、最後の24時間”. はやぶさ、7年間の旅. 日本電気 (2011年6月2日). 2014年1月21日閲覧。
- ^ “「はやぶさ」、最終の軌道修正となるTCM-4によりWPAへの精密誘導を完了”. マイナビニュース. (2010年6月9日) 2010年7月18日閲覧。
- ^ 柴田孔明 (2010年6月15日). “No.1447 :カプセル回収結果報告”. 宇宙作家クラブ ニュース掲示板. 宇宙作家クラブ. 2010年7月30日閲覧。
- ^ a b c 東山正宜 (2010年6月14日). “はやぶさカプセル、先住民の聖地で発見 了解得て回収へ”. 朝日新聞. オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “はやぶさの旅「世界最長」 2592日、ギネスに申請”. 朝日新聞. (2010年6月15日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ a b “はやぶさ帰還、カプセル回収へ”. AFPBB News. (2010年6月14日) 2010年6月14日閲覧。
- ^ a b 本間雅江 (2010年6月14日). “「はやぶさ」カプセル破損なし…18日にも日本へ”. 読売新聞. オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ “『はやぶさ』カプセル回収 日本に空輸、分析へ”. 東京新聞. 共同通信. (2010年6月15日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ NASA Ames Research Center (2010年6月13日). “NASA Team Captures Hayabusa Spacecraft Reentry”. YouTube. 2010年6月14日閲覧。
- ^ “ねとらぼ:「はやぶさ」が光輝き、散っていく NASAが空撮映像を公開”. ITmedia ニュース. (2010年6月14日) 2010年6月15日閲覧。
- ^ a b “Hayabusa Asteroid Mission Comes Home”. NASA (2010年6月14日). 2010年6月15日閲覧。
- ^ a b c “「はやぶさ」サンプルコンテナ開封作業を開始”. ISAS/JAXA (2010年6月25日). 2010年7月5日閲覧。
- ^ a b ニュートンプレス 2010, p. 29.
- ^ a b c d e 藤村彰夫 & 安部正真 2010, p. 211.
- ^ a b “はやぶさカプセルが日本到着 宇宙機構で分析へ”. 共同通信. (2010年6月18日) 2010年6月18日閲覧。
- ^ 秋山文野 (2010年6月16日). “「はやぶさ」は浦島太郎!? 宇宙経由の輸出入大作戦”. “JAXAの真田ぁ〜ず”に総力インタビュー! publisher=アスキー・メディアワークス. 2011年5月26日閲覧。
- ^ a b “「はやぶさ」のカプセル、生まれた施設到着”. 読売新聞. (2010年6月18日). オリジナルの2010年6月21日時点におけるアーカイブ。 2010年6月18日閲覧。
- ^ a b c d e 矢田達 et al. 2013, p. 73.
- ^ “「はやぶさ」カプセルからガス成分回収 JAXA”. 日本経済新聞. (2010年6月24日) 2010年7月5日閲覧。
- ^ 永山悦子 (2010年6月25日). “小惑星探査機:「はやぶさ」カプセル開封 内部から気体、分析へ”. 毎日新聞. オリジナルの2010年6月28日時点におけるアーカイブ。 2010年7月5日閲覧。
- ^ a b c “「はやぶさ」カプセルに粒子十数個 直径1ミリ 「イトカワ」由来かは不明”. 日本経済新聞. (2010年7月5日) 2010年7月5日閲覧。
- ^ “微粒子新たに数十個発見 はやぶさ、分析は9月以降”. 共同通信. (2010年7月7日) 2010年7月12日閲覧。
- ^ “「はやぶさ」カプセルの微粒子、100個超確認 直径10マイクロメートル級”. 日本経済新聞. (2010年7月7日) 2010年7月12日閲覧。
- ^ a b 矢田達 et al. 2013, p. 74.
- ^ 松浦晋也 (2010年7月12日). “ヘラに付着した微粒子の回収方法を検討中”. 松浦晋也のL/D. 2010年7月18日閲覧。
- ^ a b 唐牛譲、石橋之宏、上椙真之 ほか、JAXA惑星物質試料受入設備における「はやぶさ」帰還試料の取り扱いと汚染管理 地球化学 Vol.48 (2014) No.4 p.211-220, doi:10.14934/chikyukagaku.48.211
- ^ 松浦晋也 (2010年10月6日). “はやぶさサンプル回収;10月6日午後5時半からの記者会見”. 松浦晋也のL/D. 2010年10月6日閲覧。
- ^ 矢田達 et al. 2013, pp. 74–75.
- ^ a b c 矢田達 et al. 2013, p. 75.
- ^ 小林行雄 (2010年12月14日). “JAXA、はやぶさカプセルのB室を開封 - 肉眼で確認できるサイズの粒子は無し”. マイナビニュース 2011年3月16日閲覧。
- ^ a b 『はやぶさカプセル内の微粒子の初期分析の開始について』(プレスリリース)宇宙航空研究開発機構、2011年1月17日。2014年1月21日閲覧。
- ^ 大塚実 (2010年8月23日). “はやぶさウィークリーブリーフィング第5回”. 大塚実の取材日記. 2010年9月11日閲覧。
- ^ “「はやぶさ」カプセル内の微粒子、初期分析開始”. sorae.jp. (2011年1月18日). オリジナルの2014年2月2日時点におけるアーカイブ。 2014年1月21日閲覧。
- ^ 「「はやぶさ」微粒子の初期分析が行われる」『SPring-8 NEWS』第55号、RIKEN / JASRI、2011年3月、5頁、2014年1月22日閲覧。
- ^ “JAXA、「はやぶさ」カプセル内の微粒子の初期分析の中間結果を発表”. マイナビニュース. (2011年3月11日) 2011年3月16日閲覧。
- ^ “小惑星イトカワの真の姿を明らかに”. JAXA (2012年1月30日). 2011年2月5日閲覧。
- ^ 『小惑星探査機「はやぶさ」(MUSES-C)回収したカプセル等の展示について』(プレスリリース)宇宙航空研究開発機構、2010年7月8日。2010年9月11日閲覧。
- ^ 東山正宜 (2010年7月30日). “「はやぶさ」カプセル公開に1.3万人 最長3時間待ち”. 朝日新聞. オリジナルの2010年8月3日時点におけるアーカイブ。 2010年7月30日閲覧。
- ^ “「はやぶさ」カプセル展示”. ISAS/JAXA. 2010年10月28日閲覧。
- ^ 『小惑星探査機「はやぶさ」カプセル等の展示協力機関の公募について』(プレスリリース)宇宙航空研究開発機構、2010年9月1日。2010年9月11日閲覧。
- ^ “もう1つの旅が終了〜「はやぶさ」帰還カプセル巡回展示〜”. ISAS / JAXA (2012年4月9日). 2012年6月2日閲覧。
- ^ 中根政人 (2010年10月28日). “小惑星探査機『はやぶさ』を追って 実物大“カプセル”展示”. 東京新聞. オリジナルの2010年10月30日時点におけるアーカイブ。 2010年10月28日閲覧。
- ^ “「はやぶさ」回収カプセルのレプリカを展示 (2011年1月15日〜)”. 天文ニュース. 県立ぐんま天文台 (2011年1月14日). 2011年9月23日閲覧。
- ^ 上杉邦憲 (2010年5月7日). “「はやぶさ」宇宙開発史上のトップ7に選ばれる!”. はやぶさ、地球へ! 帰還カウントダウン. JAXA. 2010年7月20日閲覧。
- ^ “探査機はやぶさギネス認定 小惑星から物質回収”. 産経新聞. (2011年6月13日). オリジナルの2011年6月16日時点におけるアーカイブ。 2011年6月13日閲覧。
- ^ “GUINESS・WORLD RECORDSTM CERTIFICATE” (PDF) (英語). 2011年6月27日時点のオリジナルよりアーカイブ。2011年6月13日閲覧。
- ^ View of Sun from Dawn
- ^ a b “2010年宇宙の旅:はやぶさの耐熱カバーを回収 帰還地で全作業終了--JAXA”. 毎日新聞. (2010年6月16日). オリジナルの2010年6月19日時点におけるアーカイブ。 2010年6月18日閲覧。
- ^ “「はやぶさの日」制定について”. 大船渡市 (2012年6月6日). 2012年6月16日閲覧。
- ^ a b c 白石直子 (2010年11月21日). “採取システム愛媛産 小惑星探査機「はやぶさ」 矢島さん(新居浜・住友重機)ら開発 県内企業加工”. 愛媛新聞. オリジナルの2012年12月3日時点におけるアーカイブ。 2011年1月23日閲覧。
- ^ 宇宙航空研究開発機構産業連携センター「特別付録 ドキュメントはやぶさ」『日本の宇宙産業』vol.2(宇宙をつかうくらしが変わる)、日経BPコンサルティング、2010年11月、ISBN 978-4-901823-53-1。
- ^ 矢野創、川口淳一郎、安部正真、藤原顕、森本睦子、秋山演亮、三浦弥生、出村裕英 ほか「ポストMUSES-C時代の小天体探査計画の検討」『宇宙科学シンポジウム』第1巻、宇宙科学研究所、2001年1月11日、153 - 160頁、NAID 40005398033、2014年9月12日閲覧。
- ^ 矢野創、川口淳一郎、秋山演亮、MEF-小天体探査フォーラム「次期太陽系始原天体探査ミッション検討例」『宇宙科学シンポジウム』第2巻、宇宙航空研究開発機構宇宙科学研究本部、2001年11月19日、335-342頁、NAID 40005599042、2014年9月11日閲覧。
- ^ 本間雅江; 江村泰山 (2010年6月14日). “奇跡生んだ粘りと技術…「はやぶさ」帰還”. 読売新聞. オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ a b c 小宮山亮磨; 福島慎吾 (2010年6月14日). “はやぶさ、ありがとう 砂漠から管制室からファン見守る”. 朝日新聞. オリジナルの2010年6月15日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ a b c 西川拓; 永山悦子 (2010年6月5日). “知りたい!:小惑星探査機13日帰還 はやぶさ君、人気急加速 数々の危機克服に共感”. 毎日新聞. オリジナルの2010年6月9日時点におけるアーカイブ。 2010年6月16日閲覧。
- ^ “迷子-満身創痍-最後は燃え尽き… けなげ「はやぶさ君」に共感広がる”. 産経新聞. (2010年6月12日). オリジナルの2010年6月15日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ “はやぶさ帰還に感動「息子のよう」「日本の誇り」”. 読売新聞. (2010年6月14日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ 鮮于鉦 (2010年6月14日). “小惑星探査機「はやぶさ」の帰還に日本中が熱狂”. 朝鮮日報日本語版. オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “天皇陛下お誕生日に際し(平成22年)”. 宮内庁. 2010年12月27日閲覧。
- ^ “皇后陛下御歌 三首 平成二十二年” (PDF). 天皇皇后両陛下のお歌. 宮内庁. 2013年10月20日閲覧。
- ^ “両陛下のお歌8首”. 産経新聞 (2011年1月1日). 2011年1月12日時点のオリジナルよりアーカイブ。2011年1月9日閲覧。
- ^ “「はやぶさ」、30分着陸していた 試料は採取できず”. 朝日新聞. オリジナルの2008年10月13日時点におけるアーカイブ。 2010年6月25日閲覧。. 朝日新聞. 2010年6月25日閲覧。
- ^ a b c d e f g h “「はやぶさ」奇跡の帰還に生中継なし テレビ局に失望と批判の声”. J-CASTニュース. (2010年6月14日) 2010年6月14日閲覧。
- ^ a b c d “BIGLOBEがサッカー2010W杯日本・カメルーン戦のツイート情報を分析 〜ツイッター上で高評価だったのは本田・長友選手〜”. NECビッグローブ (2010年6月15日). 2010年6月16日閲覧。
- ^ “NHK『はやぶさ』中継せず国民激怒! NHK「さすがに限界かも知れません」”. ロケットニュース24. (2010年6月13日). オリジナルの2010年6月16日時点におけるアーカイブ。 2010年6月16日閲覧。
- ^ ヤンヤン. “満身創痍「はやぶさ」帰還 本体は燃え尽きたけどカプセル無事の健気さ”. JCASTテレビウォッチ. 2010年6月14日閲覧。
- ^ “「太陽系の起源解明に期待」 はやぶさ快挙と豪メディア”. 産経新聞. 共同通信. (2010年6月14日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月21日閲覧。
- ^ 新井重徳 (2010年6月21日). “「はやぶさ」帰還 喝采の陰で忍び寄る「成果の風化」”. 日本経済新聞 2011年5月26日閲覧。
- ^ “快挙「はやぶさ」のドラマたっぷり 23日三島で講演会”. 朝日新聞. (2010年11月17日). オリジナルの2012年2月22日時点におけるアーカイブ。 2011年5月26日閲覧。
- ^ Tomomichi Amano (2010年7月9日). “宇宙計画の教育的効果、コストをはるかに上回る=「はやぶさ」の川口教授”. ウォール・ストリート・ジャーナル 日本版. オリジナルの2010年7月12日時点におけるアーカイブ。 2011年5月26日閲覧。
- ^ “はやぶさ偉業、花開け イトカワ微粒子、茨城大で分析”. 茨城新聞. (2011年1月2日). オリジナルの2011年1月4日時点におけるアーカイブ。 2011年5月26日閲覧。
- ^ “菅内閣総理大臣から小惑星探査機「はやぶさ」プロジェクトマネージャー川口淳一郎教授へのお祝いについて”. 文部科学省 (2010年6月14日). 2010年6月15日閲覧。
- ^ 山田大輔. “はやぶさ:後継機「2」開発推進へ 参院本会議で菅首相”. 毎日新聞. オリジナルの2010年6月18日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “蓮舫行刷相 はやぶさ帰還を絶賛 「仕分け結果、何が何でもではない」”. 産経新聞. (2010年6月15日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “「はやぶさ」航海をギネス申請=後継機予算計上に前向き-川端文科相会見”. gooニュース. 時事通信 (goo). (2010年6月15日). オリジナルの2010年6月20日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “はやぶさ帰還で首相が祝意 「日本の技術アピール」”. 共同通信. (2010年6月14日) 2010年6月15日閲覧。
- ^ a b “科学予算削減の民主、はやぶさ絶賛は「現金過ぎ」”. 読売新聞 (読売新聞社). (2010年6月14日). オリジナルの2010年6月17日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “「はやぶさ」を支えた声” (2005年11月29日). 2005年12月17日閲覧。
- ^ 2005
/11 /25%2022:28%20JST
2005/11 /26%2001:05%20JST
2005/11 /26%2003:35%20JST
2005/11 /26%2015:52%20JST - ^ a b 秋山文野 (2010年6月17日). “「はやぶさ」の夢は続く、開発者が考えるその先にあるもの”. “JAXAの真田ぁ〜ず”に総力インタビュー!. アスキー・メディアワークス. 2011年1月26日閲覧。
- ^ “はやぶさとリポビタンD”. 月探査情報ステーション. 2022年6月13日閲覧。
- ^ “「はやぶさリンク」:未完のミッション”. 松浦晋也のL/D (2005年12月14日). 2005年12月17日閲覧。
- ^ “「はやぶさ」ペーパークラフト”. ISAS/JAXA. 2012年3月8日時点のオリジナルよりアーカイブ。2010年7月18日閲覧。
- ^ soyuz (2006年6月16日). “swingby 無料配信のお知らせ”. :::フクマニッキ:::. 2011年2月9日閲覧。
- ^ soyuz (2006年6月11日). “8823”. :::フクマニッキ:::. 2011年2月9日閲覧。
- ^ soyuz (2006年7月27日). “宇宙士官候補生☆”. :::フクマニッキ:::. 2011年2月9日閲覧。
- ^ soyuz (2006年7月29日). “コスモス”. :::フクマニッキ:::. 2011年2月9日閲覧。
- ^ “ねとらぼ:イカロス君「はやぶさ兄さんに僕の広がった姿を見せられてよかった!」”. ITmedia ニュース. (2010年6月11日) 2011年2月5日閲覧。
- ^ “ひと――探査機「はやぶさ」のコスプレーヤー 秋の『』さん(22)”. 朝日新聞: p. 第2面. (2011年2月5日). "秋の『』(あきの。鉤括弧は読まない)は、はやぶさを萌え擬人化したコスプレイヤーとして多数のメディアに出演している。『はやぶさLOVE講座』では表紙や口絵にコスプレ姿で登場し、本文中のガイド役をしている。"
- ^ “はやぶさファン!”. 月探査情報ステーション. 2010年6月16日閲覧。
- ^ 東山正宜; 福島慎吾 (2010年6月13日). “はやぶさ動画中継、NASAも和歌山大も「ニコ動」も”. 朝日新聞. オリジナルの2010年6月16日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ “小惑星探査機「はやぶさ」カプセル帰還ライブ中継”. 和歌山大学宇宙教育研究所. 2014年1月22日閲覧。
- ^ a b c 三柳英樹 (2010年6月14日). “「はやぶさ」地球帰還、関連サイトや生中継に多数のアクセス”. INTERNET Watch (インプレス) 2010年6月19日閲覧。
- ^ 小宮山亮磨; 福島慎吾 (2010年6月14日). “あきらめない姿 人生重ね はやぶさ帰還 ファン集う ツイッターでも人気者”. 朝日新聞朝刊13版: p. 30面
- ^ a b 永沢茂 (2010年6月15日). “「はやぶさ」発光確認後、10分間で2万7000件以上のツイート”. INTERNET Watch (インプレス) 2010年6月16日閲覧。
- ^ 松浦晋也 (2010年6月16日). “はやぶさ2に向けて”. 松浦晋也のL/D. 2010年6月18日閲覧。
- ^ 東山正宜; 勝田敏彦 (2010年6月12日). “「史上最も愛された探査機」 はやぶさグッズ、完売御礼”. 朝日新聞. オリジナルの2010年6月15日時点におけるアーカイブ。 2010年6月14日閲覧。
- ^ “「はやぶさ」プラモデルが人気 地球帰還で受注急増”. 静岡新聞. (2010年6月22日). オリジナルの2010年6月24日時点におけるアーカイブ。 2010年7月21日閲覧。
- ^ 阿部朋美 (2010年8月1日). “「はやぶさプラモ」大人気 葵区の制作会社、賭け実る”. 朝日新聞. オリジナルの2010年8月3日時点におけるアーカイブ。 2010年8月2日閲覧。
- ^ “「はやぶさ」帰還 プラネタリウム上映で人気”. 産経新聞. (2010年6月14日). オリジナルの2010年6月19日時点におけるアーカイブ。 2010年6月15日閲覧。
- ^ “プロダクション・ノート”. 映画『はやぶさ/HAYABUSA』公式サイト. 20世紀フォックス. 2012年3月13日閲覧。
- ^ “「架空の役がまずかった?」スタートでいきなりつまづいた映画『はやぶさ』シリーズ”. 日刊サイゾー. (2011年11月8日) 2012年3月13日閲覧。
- ^ 西田健作 (2011年7月12日). “映画「はやぶさ」3社競う”. 朝日新聞朝刊13版: p. 27面
- ^ 入倉功一 (2011年7月2日). “映画「はやぶさ」が国際宇宙ステーションきぼう内で上映決定! 地球最速宇宙試写会に!”. シネマトゥデイ (ウエルバ) 2011年7月12日閲覧。
- ^ “はやぶさ:世界初の宇宙試写会 古川聡宇宙飛行士も感激 被災地へエールも”. 毎日新聞デジタル. (2011年7月28日). オリジナルの2011年8月27日時点におけるアーカイブ。 2011年8月17日閲覧。
- ^ 『<地球館2階 日本の宇宙開発コーナー(常設展示)>-日本の宇宙開発に関する新規資料を公開-』(PDF)(プレスリリース)国立科学博物館、2013年3月22日。2013年5月22日閲覧。
- ^ “『劇場版HAYABUSA2』小惑星探査の真実に迫る予告編 ナレーターは篠田三郎”. クランクイン (2020年10月15日). 2020年11月5日閲覧。
- ^ “映画「はやぶさ / HAYABUSA」が全米公開決定!”. RBB TODAY (イード). (2011年10月1日) 2011年10月1日閲覧。
- ^ “舞台 はやぶさものがたり〜宙(そら)翔けた軌跡〜”. 2015年8月12日時点のオリジナルよりアーカイブ。2015年9月8日閲覧。
- ^ “甲斐恵美子オフィシャルサイト”. www.kaiemiko.com. 2020年10月31日閲覧。
- ^ “過去の番組一覧|あすたむらんど”. www.asutamuland.jp. 2020年10月31日閲覧。
- ^ “JAXA小惑星探査機「はやぶさ」物語|映像|「祈り」-小惑星探査「はやぶさ」ミッションの全貌-”. spaceinfo.jaxa.jp. 2020年10月31日閲覧。
- ^ “ISAS | 「はやぶさ」ビデオ「祈り」が WorldMediaFestival 部門別銀賞受賞! / トピックス”. www.isas.jaxa.jp. 2020年10月31日閲覧。
- ^ “はやぶさ帰還ライブ中継 - 和歌山大学 宇宙教育研究所”. web.wakayama-u.ac.jp. 2020年10月31日閲覧。
- ^ “「はやぶさ」おかえり番組”. 産経新聞. (2010年6月10日). オリジナルの2010年10月7日時点におけるアーカイブ。 2010年6月23日閲覧。
- ^ 冥王星に「はやぶさ大地」 日本の小惑星探査機にちなみ国際天文学連合が命名「功績に敬意」 - 産経ニュース 2017年9月8日
- ^ 「“はやぶさ”快挙はなぜ実現したか」 - NHKアーカイブス 2010年8月28日
- ^ 挑み続けた2592日...感動のドラマの裏側 「あきらめなければ未来は拓ける!」 - テレビ東京 2011年3月24日
- ^ 小惑星探査機はやぶさ 奇跡の地球帰還 - NHK 2024年9月21日
{kind=link}
関連項目
[編集]- はやぶさ2:本機の後継機
外部リンク
[編集]- 宇宙航空研究開発機構(JAXA)
- 小惑星探査機「はやぶさ」のドキュメント全天周映画(はやぶさ制作委員会)
- はやぶさ(月探査情報ステーション)
- 我が国の宇宙開発利用における 産業の育成方策について - ウェイバックマシン(2009年3月11日アーカイブ分) (PDF) 2009年(平成21年)2月5日・宇宙開発戦略本部事務局(首相官邸)
- 日本電気(NEC)
- MUSES-C Solar Array Electrical and Mechanical Design - harvard.edu (2011年6月23日閲覧)
- イオンエンジンによる小惑星探査機「はやぶさ」の帰還運用 2010年2月1日 プラズマ・核融合学会誌 (PDF)
- 「はやぶさ」 奇跡の帰還(2010年) - NHK放送史
小惑星の探査・観測 | ||
|---|---|---|
| フライバイ |
|   |
| オービター・ ランデブー | ||
| ランダー・ インパクター | ||
| 計画・予定 |
| |
| 構想段階 | ||
| 関連項目 | ||
| 太字の下線 は現役の宇宙機を示す | ||
| ||||||||||||||||||||
| ||||||||||||||||||||
|
| ||||||||||||||||||||
| 典拠管理データベース: 国立図書館 |
|---|